基于FPGA的室內(nèi)智能吸塵平臺設(shè)計

3 程序設(shè)計要點
將程序分為硬件程序設(shè)計和軟件程序設(shè)計兩部分,硬件程序設(shè)計要對硬件電路進行時序仿真以確定達到調(diào)試的效果。
3.1 硬件程序設(shè)計與仿真
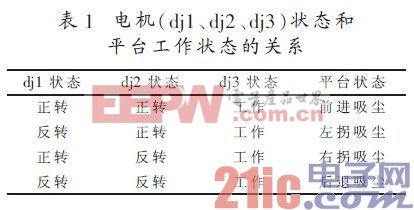
平臺主要通過傳感器和碰撞開關(guān)產(chǎn)生輸入信號,通過FPGA處理信號,最后FPGA把處理后的信號傳到電機,由電機來完成一系列的動作,如表1所示。所以其邏輯設(shè)計是實現(xiàn)智能的關(guān)鍵。

結(jié)束硬件選型后,利用Quartus II搭建硬件原理圖,編譯后對jk1、jk2、jk3、 jk4進行時序仿真,分析時序關(guān)系,估計設(shè)計的性能并檢查和消除競爭冒險[7-9]。仿真結(jié)果如圖3所示。
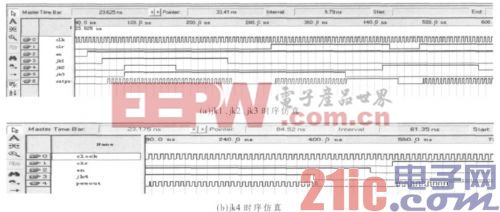
時序仿真圖中,clk為輸入PWM信號,clr和en兩個模塊的片選信號是由FPGA的SoPC通過軟件C語言控制。當(dāng)jk1=0、jk2jk3=1時,output(PWM控制信號)會出現(xiàn)一段等于0之后產(chǎn)生20個波形。需要說明的是:圖3(a)時序仿真圖中,output出現(xiàn)一段PWM后出現(xiàn)低電平后接著出現(xiàn)了20個PWM,說明平臺在正常前進遇到j(luò)k1=0、jk2jk3=1時,會停車一段時間接著左拐或者右拐20個PWM角度。驅(qū)動器用的是4細分,輸出1個PWM波形步進電機會轉(zhuǎn)動0.45°,應(yīng)該旋轉(zhuǎn)90°但是波形個數(shù)為:n=(90/0.45)=200個,在此用20個代替200個說明問題(圖3(b)的波形個數(shù)都會以此情況說明)。
由圖3(b)可以看到前段時間jk4為高電平,pwmout輸出正常脈沖,說明此時平臺處于正常吸塵狀態(tài)。后段時間jk4變?yōu)榈碗娖剑琾wmout時延后輸出一小段脈沖,說明此時平臺檢測到樓梯,停車一段時間后調(diào)整方向。
3.2 軟件程序設(shè)計
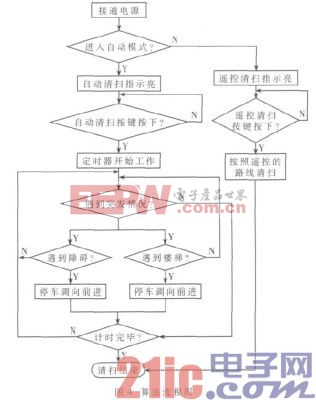
硬件設(shè)計調(diào)試完成后,還要進行軟件系統(tǒng)設(shè)計。在C語言文件中編寫C程序進行SoPC的編程[10]。平臺工作總體算法流程如圖4所示。平臺接通電源,首先初始化進入自動清掃和手動遙控清掃二選一模式;當(dāng)選擇自動清掃模式時,通過鍵盤輸入平臺自動清掃工作時間,在清掃過程中通過傳感器判斷是否遇到障礙物或樓梯并進行處理。通過中斷,時刻查詢是否到達設(shè)置時間,如果沒到,則程序返回運行;如果設(shè)置時間到,則程序結(jié)束,平臺停止工作。當(dāng)選擇遙控清掃時,平臺運動受操作者的控制。
通過硬件選型、搭建調(diào)試和軟件語言的編寫調(diào)試,成功地制作出了簡易平臺,實現(xiàn)了既定的各種功能。相比市場上的同類產(chǎn)品,其結(jié)構(gòu)更簡單、成本更低、靈活性和擴展性更強,為研究者開發(fā)更多功能提供了一個硬件支持的平臺,具有實用價值。隨著微處理器的不斷進步和傳感技術(shù)的發(fā)展,其性能可不斷改進,成本也可不斷下降。但在仿真和實現(xiàn)過程中發(fā)現(xiàn)其具體的流程算法不夠嚴謹,日后有必要繼續(xù)對其進行改進。
蜂鳴器相關(guān)文章:蜂鳴器原理 光電開關(guān)相關(guān)文章:光電開關(guān)原理 晶振相關(guān)文章:晶振原理












評論