基于FPGA的交通路口車流量檢測方法研究

由圖2可以看出,路面上有很多不連貫的黑色區域和黑點,這些噪聲會對檢測結果產生不利的影響,因此,將上述二值化后的圖像序列再進行中值濾波,采用5*5的檢測窗口,可以去濾掉圖像上大部分的椒鹽噪聲,起到保護邊緣信息的作用,如圖3所示。本文引用地址:http://www.104case.com/article/189598.htm

1.2 算法實現
由圖2及圖3清晰可見,經過二值化后的圖像,車身前方的陰影呈黑色,路面呈白色,因此能把車身前方的陰影部分和路面信息清晰的分隔開來。當車輛行駛到某一位置時,車身前方的陰影一定會造成車輛前方的路面上的區域的灰度值發生劇烈的變化。因此,當發生一次劇烈變化,計數器計一次數,這樣即可計算出行駛過的車輛的數量。
在車輛行駛的道路前方,設置一虛擬檢測區域,便可以實現上述過程。傳統的虛擬檢測區域可以分為3類:基于特征點、基于檢測線、基于檢測窗口。于檢測點包含的信息量太少,且易受噪聲干擾;而檢測區域過大,當車輛經過時,容易造成重復計數,因此文中將采取基于檢測線的檢測方法。如圖4所示。
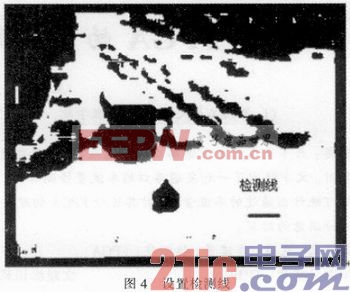
當車輛即將行駛到檢測線上時,車身前方的陰影會迅速覆蓋檢測線,造成檢測線上的灰度值發生劇烈的變化。通過設定閾值,若灰度變化大于閾值,可判斷為有一輛車到達,若灰度變化小于閾值,就判斷為沒有車輛通過,這樣便完成了整個檢測過程。
由上可知,我們只需處理每一幀圖像的一行像素值,因此大大減少了數據的存儲空間,從而使計算機的處理速度更快。在實際處理中,用前一幀圖像減去后一幀圖像,比較差值圖像檢測線位置的像素值,此處通過大量實驗數據,設定閾值為15,若其值大于該閾值,則可判斷有車輛通過,若小于該閾值,則沒有車輛通過。所有檢測線位置像素值做差后,可得到如圖5所示的數據曲線。
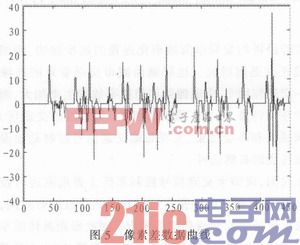
由圖5可見,圖像的正值尖峰,可看做一輛車的到來,通過設定閾值,可將小的尖峰部分濾掉,小的尖峰部分是車身及車窗造成的干擾,故通過此方法,可得到具體通過路口的車輛的數量。
統計寬闊路口的車流量,可將整個路口分成幾個車道,對幾個車道分別用此方法進行統計,最終求和,即可實現車流量的統計。












評論