基于黑板的多Agent智能決策支持系統的Agent實現

Agent是人工智能和對象實體相結合的產物,是能夠獨立、自動代替用戶執行某一特定任務的程序。Agent所具有的自治、協作、學習、歸納、推理等特性能夠支持各階段的決策制定和問題求解,增強傳統決策支持系統的功能。基于Agent的結構提供可柔性、可變性、魯棒性,適用于解決一些動態的,不確定的和分布式的問題。Agent之間通過相互調度、合作協同完成大規模的復雜問題求解。由于絕大多數工作都是在特定的群體環境中由組成群體的各主體分工協作、共同完成的。大多數工作同時伴隨著決策過程,而決策過程的優劣直接影響工作任務的順利完成,因此,Agent技術使建立一個網絡化、智能化、集成化的人機協調的智能決策支持系統成為現實。
在傳統的智能決策支持系統的基礎上,提出了一種基于黑板的多Agent智能決策支持系統。在該系統中,黑板能為分布式結構系統提供公共工作區,每個Agent可利用黑板充分交換信息、數據和知識,任意時候訪問黑板,查詢發布內容,然后各自提取所需的工作信息,以便完成各自擔當的任務,并且通過黑板協調各個Agent,使多個Agent共同協作來求解給定的問題,同時強調將決策者的智慧和系統相結合。
2 基于黑板的多Agent智能決策支持系統
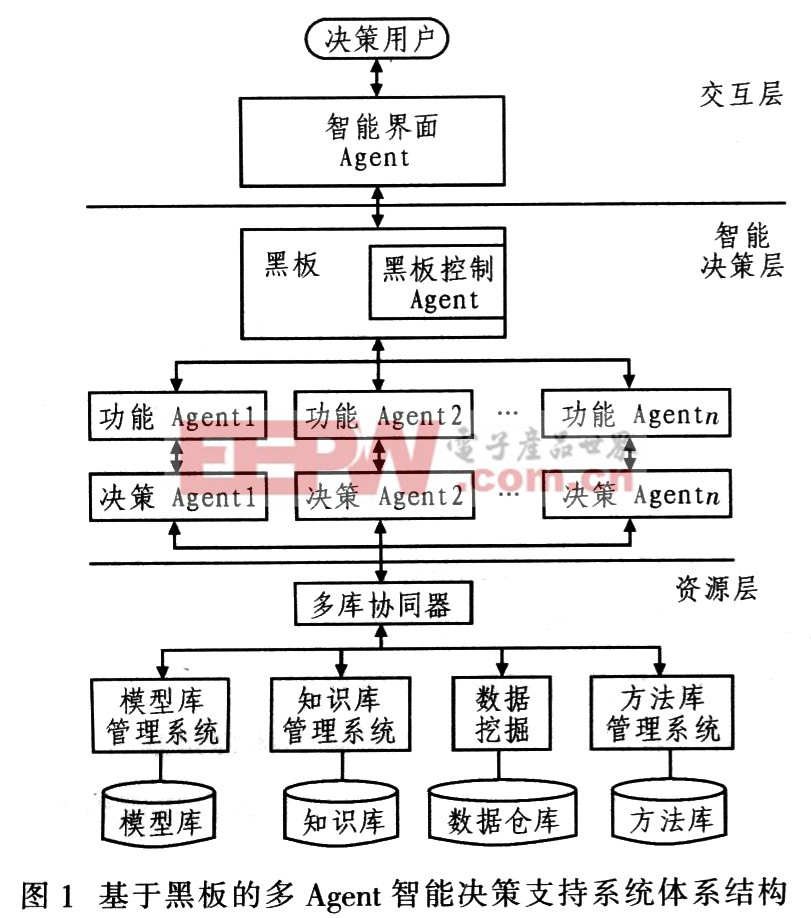
在基于黑板的多Agent智能決策支持系統中,每種決策任務或功能是由獨立的Agent完成,各種Agent通過相應標準從各自角度分析問題,每個Agent能力、意志和信念的不同,使它們具有問題求解領域的知識以及問題求解的技能也不同。不同的Agent從自身角度審視決策問題獨立完成子任務,然后通過黑板協同合作實現共同目標。由于Agent的自治性和實體化,可以隨時加入或離開一個問題求解系統,使得決策者方便地參與到決策過程中,從而保證系統的靈活性。這里所構建的系統結構為交互層、智能決策層和資源層的3層體系結構,如圖1所示。其中智能界面Agent和決策用戶組成交互層;黑板、功能Agent和決策Agent組成智能決策層;模型庫及模型庫管理系統、知識庫及知識庫管理系統、方法庫及方法庫管理系統及數據倉庫和多庫協同器組成資源層。
2.1 智能界面Agent
智能界面Agent是基于Agent的智能決策支持系統體系結構中與決策者聯系的部件,能夠獨立持續運行。系統通過它和決策者通信,或利用學習用戶的目標、愛好、習慣、經驗、行為等,使用戶高效地完成任務。智能界面A―gent代替傳統的人機交互界面,強調Agent的自主性和學習性,可以主動探測環境變化,在與用戶交互共同作用的決策中,通過不斷學習,獲得用戶某些特征知識,從而在決策過程中根據感知到的用戶行為方式提供合適的用戶界面,自主地做出與用戶意志相符合的策略。智能界面Agent的全局知識中主要包括:問題領域知識、用戶模型或用戶知識、自身知識、其他Agent能力知識。它采用發現和模擬用戶學習知識,獲得用戶的正向和反向反饋學習知識.用戶的指導獲得知識,通過與其他Agent的通訊獲取知識等。
2.2 功能Agent
功能Agent監督黑板數據平面變化,匹配各決策A―gent的激活條件和黑板各平面信息,將黑板上的信息發給相應的決策Agent。功能Agent利用系統的消息、隊列機制發送黑板上的信息,并且負責報告系統運行情況,向用戶報告任務完成情況,并提供解釋和查詢。其內部有一個各決策Agent讀黑板的激活條件表,當黑板各層信息變化時,則檢查與該層信息變化有關的激活條件表,如果匹配,則進一步分析,決定是直接激活相應的決策Agent讀取黑板信息完成相應的任務或者是做其他操作,例如提供報告和解釋等。同時還隨時提供系統執行情況的查詢。它實際上就是一個可以對黑板上信息、變化進行感知的反應型Agent,每當黑板上信息改變時觸發它的檢查黑板各數據平面動作。
2.3 決策Agent
決策Agent在某個特定領域有解決問題的知識和技能。把每一種決策方法設計為一個決策Agent,多個決策Agent在功能Agent的控制和監督下,通過相互間的協調和合作,能夠解決復雜決策問題。這類Agent是可擴展的,隨著決策理論的發展和智能化決策方法的進步,可以開發更多的決策Agent。決策Agent沒有關于外部環境的模型,沒有關于其他Agent的知識,但仍然有與其他Agent交互的能力。
3 Agent的實現技術
3.1 Agent的抽象結構
Agent行為包含:感知、認知、行為3個階段。首先感知外部環境信息,然后由認知處理部分根據自身狀態,通過制定相應的決策方案,根據決策方案從多種決策方法中選擇并執行合適的方法,從而表現出主動的智能行為。在認知處理中,還需要進行規劃及學習等過程,從而不斷學習新的知識,使Agent智能不斷提高。行為輸出部分通過Agent行為對外界環境施加影響。以下對Agent進行形式的抽象描述:
首先假設環境是任何離散的瞬時狀態的有限集合E:E={e,e’…},Agent有一個可執行動作的清單,可改變環境狀態Ac={a,a’…}為(有限的)動作集合。
環境從某個狀態開始,Agent選擇一個動作作用于該狀態。動作結果是環境可能到達的某些狀態。然而,只有一個狀態可以真正實現,當然,Agent事先并不知道哪個狀態會實現。在第二個狀態的基礎上,Agent繼續選擇一個動作執行,環境到達可能狀態集中的一個狀態。然后,Agent再選擇另一個動作,如此繼續下去。
Agent在環境中一次執行r是環境狀態e與動作a交替的一個序列。假設:R是所有可能的(和上的)有限序列集合:RAC是以動作結束的序列所組成的R子集;RE是以狀態結束的序列所組成的R子集;用r,r’…代表R的成員。
為了表示Agent的動作作用于環境的效果,引入狀態轉移函數τ:RAC→RE。狀態轉移函數建立一個執行(假設以Agent的動作作為結束)與可能的環境狀態集合之間的映射,這些環境狀態是動作執行的結果。

評論