基于軟核處理器的二頻機抖陀螺信號處理系統

3 信號濾波實現
激光陀螺的讀取信號是由兩個光電管經光電轉換后產生的,工藝上要保證兩個光電管的拍頻相位相差90°,這樣便于在信號處理時進行相位檢測。為了盡量減小鎖區帶來的誤差,一般在陀螺中加入一個正負交變的正弦偏頻信號:![]()
根據Sagnac效應,若外界的角速度為Ω轉,則激光陀螺輸出差頻為:

式中,A為環形激光器的面積,L為激光腔的總長。
對式(2)積分可得:

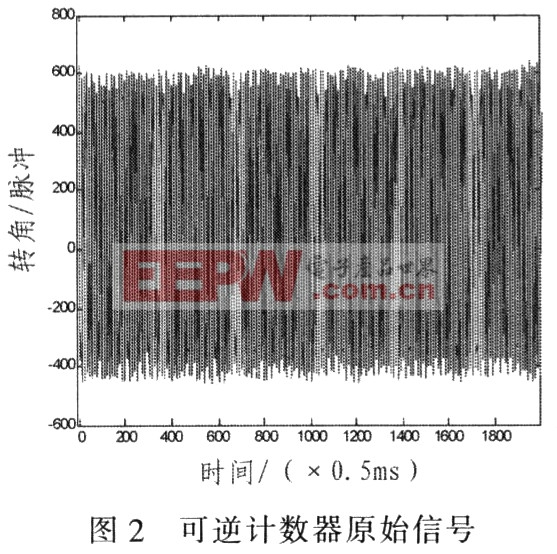
為了有效提取信號,通常是對可逆計數器的計數值(即式(3)的積分值)進行濾波。
這里采用FIR數字低通濾波器,如果FIR濾波器的系數對稱,則具有精確、嚴格的線性相位,這正是實際導航應用所要求的。為了兼顧實時性和防止信號產生混迭,設定采樣率為2 kHz,采用高階FIR濾波器。
圖2為1 s內采集的可逆計數器的輸出信號,從圖中可看出:有用信號已被抖動信號和量化噪聲完全覆蓋。圖3為信號的功率譜,從圖中可看到,抖動信號在功率譜中占很大分量(功率譜的最大值處的頻率對應抖動頻率),還原出被測量信號必須對可逆計數器的輸出信號進行低通濾波,以濾除抖動及其他雜散信號。圖4為濾波后的脈沖輸出,不同于圖2,從圖4中可清楚地看出:在2 000點(即1 s時間內)恒定地球轉速下累計約15個信號脈沖。
可編程邏輯器件為FIR濾波器的設計提供高靈活性,可采取多種結構,例如并行流水線結構、串行結構等。考慮到采樣率相對不是很高,為節約系統資源,這里采用自行設計的串行結構濾波。

評論