3 方位���、姿態求解算法
3.1 求解航向角
地磁場磁感應強度大約為50~60μT���,與地球表面平行的分量總是指向磁北極。在地平面上利用雙軸磁阻效應傳感器測定地磁場在磁阻效應傳感器的X、Y軸上的分量XH和YH��,就可確定在地平面上物體相對于磁北極的方位角φ。設定方位角φ=0時�,磁阻效應傳感器的X軸指向磁北極(正前方)�,Y軸指向右側,方位角φ逆時針為正�。根據測定的地磁場分量XH和YH����,可計算出方位角φ為:

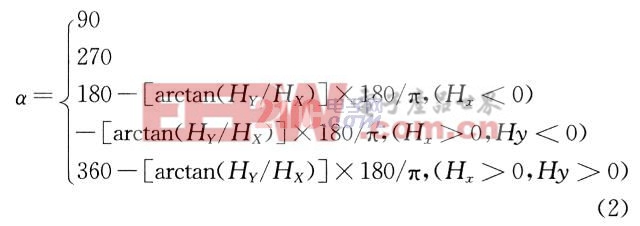
根據XH和YH的符號����,可以獲得方位角所處的象限,于是可根據式(2)求得正確的方位角:




評論