微型虛擬現實頭部跟蹤系統的設計

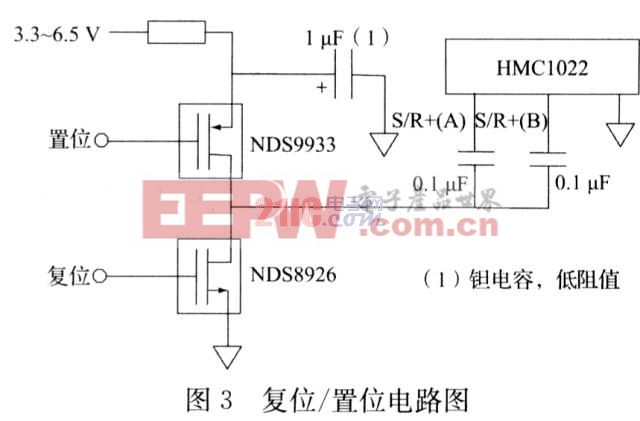
當磁阻效應傳感器暴露于干擾磁場中時,傳感器元件會分成若干方向隨機的磁區域,從而導致靈敏度衰減。環境中的強磁場(大于5×10-4T時)會導致磁傳感器輸出信號變異,為了消除這種影響并使輸出信號達到最佳,就需要應用磁開關技術(SR+/SR-)來抵消剩余磁場,而HMCl022是借助一個偏置磁場以補償干擾磁場,即通過集成在芯片內部的置位/復位合金帶對薄膜施加3~4 A,20~50 ns的脈沖電流就可以重新將磁區域對準,統一到一個方向上,這樣可確保高靈敏度和可重復的讀數。本系統采用的置位/復位電路能產生大于4 A的強電流脈沖,從而實現低噪聲和高靈敏度的磁場測量。復位電路如圖3所示,復位置位由單片機的I/O引腳進行控制。本文引用地址:http://www.104case.com/article/188297.htm

2.4 藍牙模塊
采用重慶金甌公司設計的BC04藍牙模塊來實現系統與計算機的藍牙通信。該模塊采用CSR公司的BLLIECORE4-External芯片為核心,具有體積小、功耗低等優點。完全遵循藍牙系統的數據和音頻連接。采用USB或UART主設備接口,最高支持3 Mbps的數據速率。本系統中,MSP430單片機通過UART連接藍牙模塊,在與計算機建立藍牙連接后,即可實現透明數據傳輸。在保證數據正常傳輸的情況下,將波特率設置為相對低速而穩定的9 600 bps(bit/s),數據幀為8Nl模式(8位數據位,無校驗位,1位停止位)。


評論