基于TMS320DM642的增強(qiáng)視景系統(tǒng)設(shè)計與實(shí)現(xiàn)

2.2 系統(tǒng)設(shè)備驅(qū)動的設(shè)計與實(shí)現(xiàn)
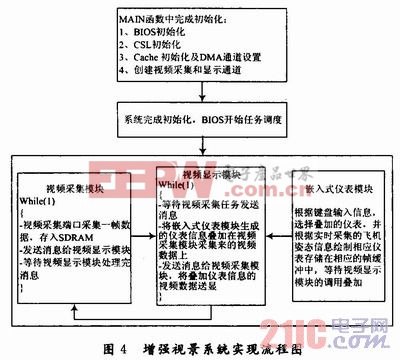
在系統(tǒng)中,綜合運(yùn)用了DSP/BIOS,DDK,RF5等技術(shù)編寫設(shè)備驅(qū)動程序,使用標(biāo)準(zhǔn)的類/微驅(qū)動程序模型來開發(fā)視頻驅(qū)動程序,使硬件驅(qū)動程序與上層應(yīng)用程序開發(fā)剝離開,提高程序的可移植和復(fù)用性能。當(dāng)開發(fā)好硬件驅(qū)動程序后,上層的應(yīng)用程序開發(fā)人員只需知道設(shè)備驅(qū)動程序提供的接口,而不需要了解底層硬件的工作原理及如何配置。
在系統(tǒng)中,當(dāng)配置好硬件的底層驅(qū)動后,在圖像采集時,底層驅(qū)動提供給上層應(yīng)用程序的接口就是存放圖像傳感器數(shù)據(jù)的幀緩沖地址;而在圖像顯示時,應(yīng)用程序只提供要顯示圖像的幀緩沖地址。這些功能的實(shí)現(xiàn)都是通過幀視頻驅(qū)動程序(FVID)來實(shí)現(xiàn)的,它不僅完成對視頻采集與顯示設(shè)備的配置,還完成視頻幀緩沖區(qū)的管理工作。
FVID函數(shù)是對GIO類函數(shù)的簡單封裝,是為GIO類設(shè)備提供的一組宏。FVID/GIO類驅(qū)動程序不僅可以完成對片上視頻口外設(shè)的配置,還能與外部設(shè)備接口(EDC)配合實(shí)現(xiàn)對外部編解碼芯片的配置。在程序中,除了完成對3個視頻口的配置外,還需對外部編解碼芯片的配置,現(xiàn)以視頻口0配置成采集通道為例來說明具體的操作過程:
(1)先在DSP/BIOS操作系統(tǒng)下的靜態(tài)配置工具中創(chuàng)建一個設(shè)備驅(qū)動,取名為“VPOCAPTURE”,在屬性頁面完成設(shè)置操作。
(2)在采集任務(wù)開始前,利用FVID_create()函數(shù)完成分配,并初始化FVID通道對象。FVID_create()函數(shù)可以配置視頻口是采集模式,還是顯示模式。在采集和顯示時,使用視頻口哪個通道來配置這個通道的參數(shù)。
(3)利用FVID_control()函數(shù)發(fā)送命令給下層的微驅(qū)動(Mini-driver),以實(shí)現(xiàn)對外部編解碼芯片的配置。
(4)在采集和顯示任務(wù)中,調(diào)用FVID幀緩沖管理函數(shù),以完成視頻幀緩沖的管理。
2.3 飛行儀表畫面的繪制與疊加
增強(qiáng)視景系統(tǒng)中除了實(shí)時采集的圖像外,還有一個很重要的功能就是要能夠顯示當(dāng)前飛機(jī)的飛行姿態(tài)、飛機(jī)發(fā)動機(jī)及航電系統(tǒng)的狀態(tài)、敵我信息的顯示等。而這些信息的顯示都是用儀表的形式顯示出來的,這些儀表可以透明或者不透明地疊加在實(shí)時采集的傳感器圖像上,從而增強(qiáng)飛行員態(tài)勢感知的能力。在系統(tǒng)中主要設(shè)計了以下幾種飛行儀表:
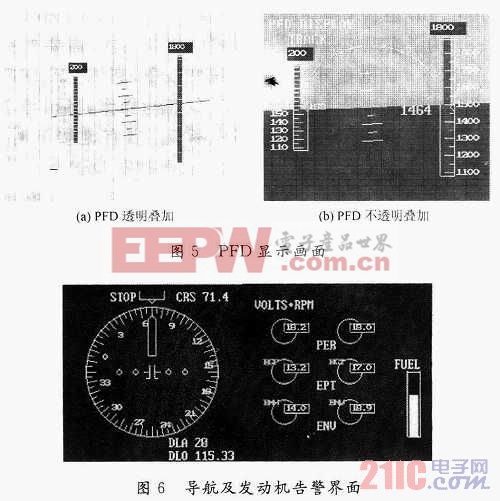
PFD(Primary Flight Display)儀表畫面是飛機(jī)飛行中最重要的飛行儀表,在PFD儀表中應(yīng)該包含的信息包括航向角、飛行姿態(tài)、空速以及高度等。PFD畫面以綜合的顯示方式包含了上面的信息,主飛行畫面如圖5所示。
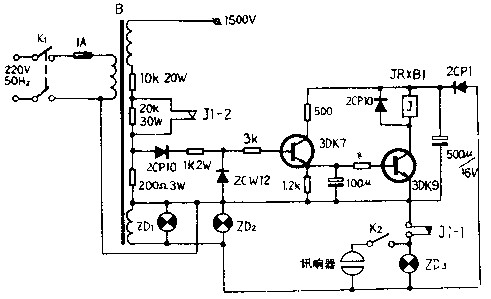
除了PFD畫面以外,還設(shè)計了發(fā)動機(jī)參數(shù)界面,用來顯示發(fā)動機(jī)參數(shù)信息。同時設(shè)計了NVD(Narigation Display)導(dǎo)航信息界面,用電子羅盤指示當(dāng)前飛機(jī)所飛行的磁航向角等,其界面如圖6所示。
3 結(jié)語
該系統(tǒng)基本實(shí)現(xiàn)了增強(qiáng)視景系統(tǒng)的功能,能夠在不低于25 f/s的圖像采集速率下,同時采集4路圖像傳感器數(shù)據(jù),實(shí)時動態(tài)疊加飛行儀表信息,以便明顯提高飛行員態(tài)勢感知能力。


評論