數控機床工作臺位置伺服系統的分析和設計

系統的開環傳遞函數為

根據系統開環傳遞函數,用MATLAB編程繪制系統Bode圖,結果如圖3所示。通過K a=1的Bode圖,發現系統的相角裕量和幅值裕量都是負值所以系統不穩定[2][3]。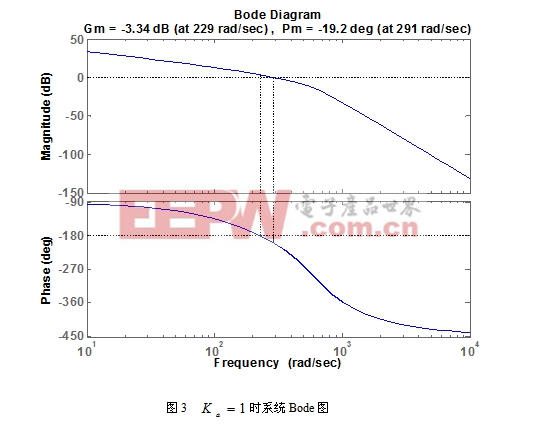
MATLAB程序如下:
Ka=1
num=Ka*4216e-6*1.25e6*9.56e-4*100
den=conv([1/600^2 2*0.5/600 1],[1/388^2 2*1.24/388 1 0])
sys=tf(num,den)
margin(sys)
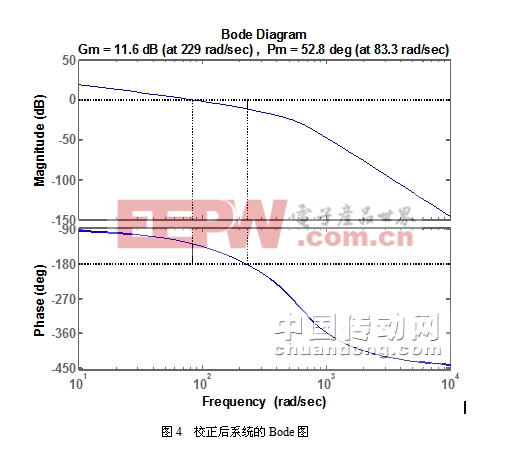
4 系統校正和動態性能指標計算
一般為滿足電液伺服系統設計要求的相角裕量應該在30~60之,幅頻裕量應當大于6dB。因此,將圖中零dB線上移,使相位裕量=50,此時增益裕量G=11dB,穿越頻率 ,開環增益
,開環增益
由上述操作得開環增益

所以放大器開環增益

,運行模型,得出系統輸出結果可以看出系統是穩定的,當輸入
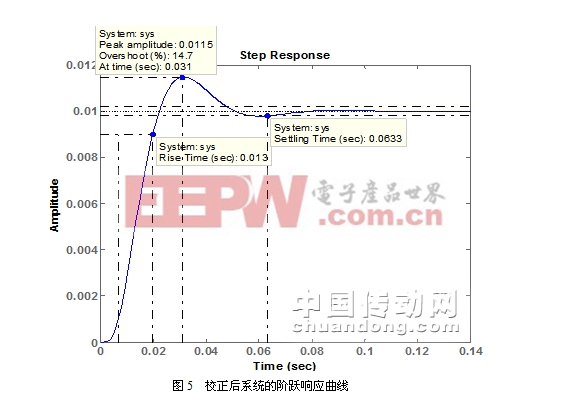
運用MATLAB對系統動態性能指標分析得
5 系統穩態誤差和頻帶寬度計算
對于干擾來說,系統是零型的。啟動和切削不處于同一動作階段,靜摩擦干擾就不必考慮。伺服放大器的
溫度零漂 、伺服閥零漂和滯環
、伺服閥零漂和滯環 、執行元件的不靈敏區
、執行元件的不靈敏區 假定上述干擾量之和為
假定上述干擾量之和為 ,由此引起的位置誤差為:
,由此引起的位置誤差為:

對指令輸入來說,系統是Ⅰ型的,最大速度 時的速度誤差為
時的速度誤差為
調用MATLAB中求系統頻帶寬度程序得系統頻帶寬度為:
6 結論
電子負載相關文章:電子負載原理 鎖相環相關文章:鎖相環原理




評論