直流電動機的非線性控制研究

摘要:在實際應用中,直流電機本身就是一個非線性系統,它的運行狀態是一個多變量、非線性、強耦合的控制對象,從電機電流和勵磁的非線性變化來看,運用非線性的控制方法應該更加合理、準確。在此,以微分幾何理論為基礎,采用非線性控制方法,設計了一種直流電動機的輸入/輸出線性化控制器,并且進行了仿真,以分析其零動態特性。對被控對象精確線性化,并給出系統所需的控制規律,具有很好的調節能力和魯棒性。
關鍵詞:直流電動機;非線性控制;輸入/輸出線性化;零動態特性
電動機把電能轉換成機械能,拖動物體運動。使用者關心的是電動機是否能按照給定的速度穩定運行。影響電動機轉速的因素很多,現以他勵直流電動機為例,由穩態時的角速度公式可知,如果某個參數變了,為了得到不變的角速度,那么其他參數肯定要有相應的變化。電動機從一個穩態到另一個穩態的過渡過程中既有機械動態也有電磁動態過渡過程,具有非線性特性;實際上,電磁時間常數遠小于機電時間常數,若忽略電磁過渡過程,就是線性系統,目前電動機的控制基本上都是按線性系統來處理的。
隨著非線性控制理論發展和應用的成熟,直接按非線性系統來控制直流電動機,一定會獲得更優的性能。
1 系統方程
1.1 狀態方程
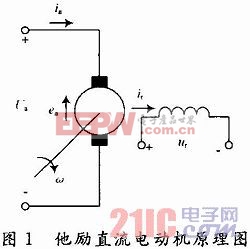
如圖1所示,它勵直流電動機勵磁回路方程為:

式中:Lr,Rr分別是勵磁回路的電感和電阻;La,ea分別是電樞回路的電感和反電動勢;TL是負載轉矩,J是轉動慣量。并且:
ea=kφωZ, T=kφiaZ, φ=LrirZ (4)
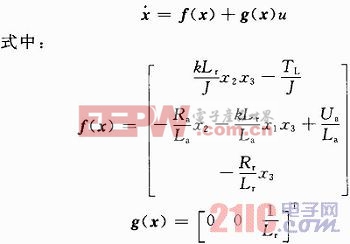
因能量守恒,電磁功率與全機械功率相等,即eaia=Tω。選x=[ω ia ir]T作為狀態變量,選勵磁電壓ur為控制量,即u=ur,系統狀態方程可寫為:











評論