基于STM32的智能循跡往返小車設計

1.4 液晶顯示模塊
液晶顯示模塊使用2.4寸TFT觸摸屏,由STM32的FSMC接口通過ILI9325驅動芯片驅動觸摸屏。該驅動芯片支持240RGBx320像素,可以顯示262144真色彩。支持MVA(Multi_domain Vertical Aligement多范圍垂直隊列)寬視角顯示,組合720通道源極驅動和320通道門極驅動,其內部集成172 800字節的GRAM(圖形內存),以及高速內存脈沖寫功能等功能。
1.5 電源電路設計
由于各電路模塊所需電壓不同,本設計需多種電源供電。STM32F103主控芯片采用3.3 V供電,電機驅動采用5 V與12 V,紅外收發檢測電路采用5 V,液晶顯示與觸角傳感電路均采用3.3 V供電。外部電源采用12 V的直流電壓,因此根據設計要求,本設計進行了電源轉換設計。
1)采用KA7805芯片實現12 V到5 V的轉換。KA7805的作用是輸入大于5 V的直流電壓,輸出5 V的直流電壓,且管腳較少,易于連接和實現,穩定性高。圖4為KA7805芯片引腳接線圖。

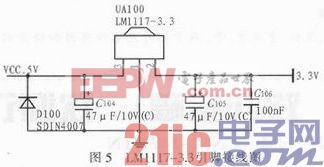
2)本設計采用LM1117—3.3芯片將5 V轉換為3.3 V,具體電路設計如圖5所示。
2 系統軟件設計
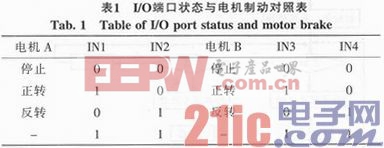
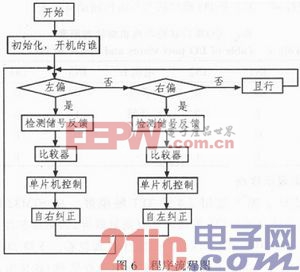
系統軟件設計采用C語言編程實現,利用單片機PWM輸出模塊和普通I/O模塊,根據系統需求,對各個模塊進行初始化配置,以實現其相應功能。主程序流程如圖6所示。
3 結論
文中根據設計內容和要求,制定了設計方案,并逐步完成了硬件和軟件部分的設計。整個系統以STM32為主控芯片,實現對小車簡單運動的控制,完成各部分電路設計并使用PROTEL畫出電路設計原理圖;軟件部分在STM32集成開發環境IAR EWARM 5.3下編寫各模塊程序,包括PWM波輸出模塊、液晶顯示模塊自由行走避障模塊和紅外循跡模塊,并通過主控制程序將各模塊融合一起。整個設計將硬件與軟件相結合,實現對小車的控制,使小車能夠做出前進、后退、左轉、右轉等動作,并通過液晶顯示器實時顯示小車的運動參數,及對小車速度進行調節,并且能夠在不同模式下通過傳感檢測電路實現簡單的避障和循跡功能,在本次設計中將PWM波占空比控制在1/2以下,使小車不會因速度過高而導致轉彎過程中其方向不易控制。論文基本完成了硬件和軟件的設計,并使之符合設計要求。
本設計與實際應用相結合,利用高性能的STM32F103芯片,輔以各種傳感器來檢測路面、障礙物等周圍環境,通過高可靠性的軟件設計,來實現小型電動車的智能控制,具有很強的現實意義。

pwm相關文章:pwm是什么
蜂鳴器相關文章:蜂鳴器原理 光電開關相關文章:光電開關原理 脈寬調制相關文章:脈寬調制原理








評論