基于DSP實現的步進電機控制器的設計

 本文引用地址:http://www.104case.com/article/173733.htm
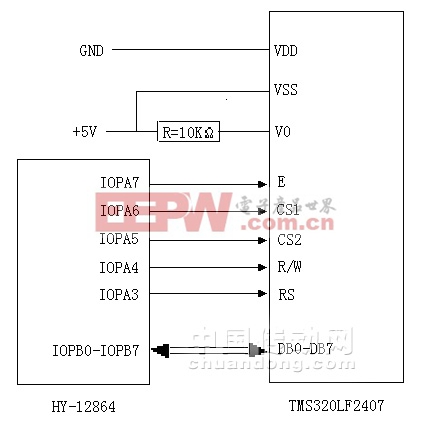
本文引用地址:http://www.104case.com/article/173733.htm圖3 液晶顯示HY-12864與TMS320LF2407的硬件連接圖
在整個軟件設計中,共包含主程序、步進電機驅動程序、液晶顯示驅動程序,按鍵掃描中斷程序、編碼器檢測換算程序等程序塊。
下面著重介紹一下步進電機驅動程序及編碼器檢測換算程序。在步進電機驅動程序設計中,充分運用TMS320LF2407控制器的事件管理模塊。在TMS320LF2407中各有一個16位比較寄存器CMPRx(x=4、5、6),每個比較器各有兩個比較PWM輸出引腳,產生3路PWM輸出信號,控制電機轉速(位置),其輸出引腳極性將由控制寄存器(ACTR)的控制位來決定,根據需要選擇高電平或低電平作為開通信號。在PWM信號調制中需要周期一定的載波,這時用到了定時器3,它以內部CPU時鐘作為輸入,工作于連續增/減計數模式下,產生PWM脈沖輸出,產生的脈沖為一個環形可變脈沖,這時由T3PR定時周期下溢和上溢時產生中斷,刷新周期值,進行PWM調整,計算方式如下:
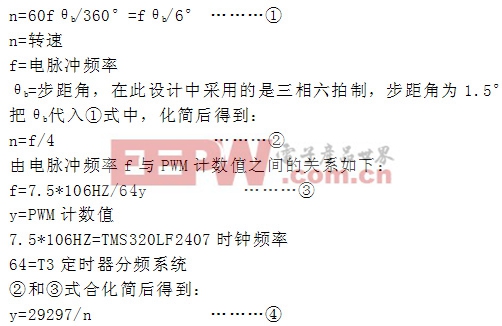
最后,此設計中把給定轉速轉化成相對應的二進制碼,用29297除以給定轉速即得到PWM基數,所得到的PWM數值再乘以3得到定時器3的T3PR的周期值,對應不同頻率的PWM脈沖輸出,如圖4,電機運行中斷程序框圖。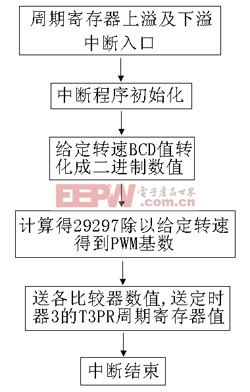
圖4 電機運行中斷程序框圖











評論