基于80C51單片機的智能小車設計

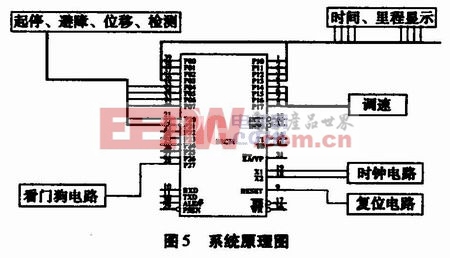
5 系統原理圖
智能電動車采用80C51單片機進行智能控制。開始由手動啟動小車,并復位,當經過規定的起始黑線,由超聲波傳感器和紅外光電傳感器檢測,通過單片機控制小車開始記數顯示并避障、調速;系統的自動避障功能通過超聲波傳感器正前方檢測和紅外光電傳感器左右側檢測,由單片機控制實現;在電動車行駛過程中,采用雙極式H型PWM脈寬調制技術,以提高系統的靜動態性能;采用動態共陰顯示行駛時間和里程。系統原理圖如圖5所示。
6 系統軟件設計
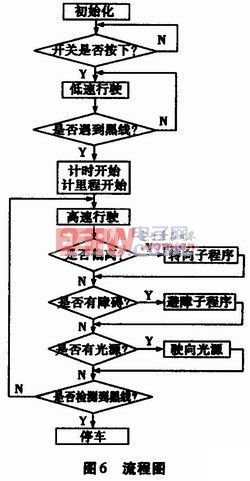
在進行徽機控制系統設計時,除了系統硬件設計外,大量的工作就是如何根據每個生產對象的實際需要設計應用程序。因此,軟件設計在微機控制系統設計中占重要地位。圖6所示為流程圖。
7 結束語
本設計采用80C5l單片機為控制核心,這主要是因為該單片機的穩定性比較好。還可以采用其它系列的單片機。采用的技術主要有:
(1)通過編程來控制小車的速度;
(2)傳感器的有效應用;
(3)新型顯示芯片的采用。












評論