基于80C51單片機的智能小車設計

摘要:采用80C51單片機為控制核心,利用超聲波傳感器檢測道路上的障礙。控制電動小汽車的自動避障,快、慢速行駛,以及自動停車,并可以自動記錄時間、里程和速度,自動尋跡和尋光功能。整個系統的電路結構簡單。可靠性能高。
關鍵詞:80C51單片機;光電檢測器;PWM調速;智能小車
O 引言
在現有玩具電動車的基礎上,加裝光電檢測器,實現對電動小汽車的速度、位置、運行狀況的實時測量,并將測量數據傳送至單片機進行處理,然后由單片機根據所檢測的各種數據實現對電動車的智能控制。
1 直流調速系統采用PWM調速
直流調速系統采用晶閘管的直流斬波器與整流電路。晶閘管不受相位控制,而是工作在開關狀態。當晶閘管被觸發導通時,電源電壓加到電動機上,當晶閘管關斷時,直流電源與電動機斷開,電動機經二極管續流,兩端電壓接近于零。脈沖寬度調制(Pulse Width Modulat-ion),簡稱PWM。脈沖周期不變。只改變晶閘管的導通時間,即通過改變脈沖寬度來進行直流調速。
脈寬調速也可通過單片機控制繼電器的閉合來實現,但是驅動能力有限。為展利實現電動小汽車的左轉和右轉,本設計采用了可逆PWM變換器。可逆PWM變換器主電路的結構式有H型、T型等類型。我們在設計中采用了常用的雙極式H型變換器,它是由4個三極電力晶體管和4個續流二極管組成的橋式電路。圖1為雙極式H型可逆PWM變換器的電路原理圖。
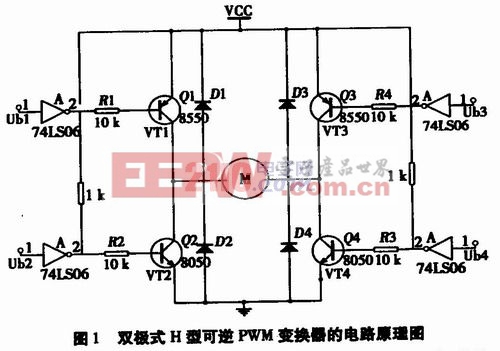
4個電力晶體管的基極驅動電壓分為兩組。VT1和VT4同時導通和關斷,其驅動電路中Ub1=Ub4;VT2和VT3同時動作,其驅動電壓Ub2=Ub3=-Ub1。
2 檢測系統
檢測系統主要實現光電檢測,即利用各種傳感器對電動車的避障、位置、行車狀態進行測量。
2.1 行車起始、終點及光線檢測
系統采用反射式紅外線光電傳感器用于檢測路面的起始、終點(2 cm寬的黑線),玩具車底盤上沿黑線放置一套,以適應起始的記數開始和終點停車的需要。利用超聲波傳感器檢測障礙。光線跟蹤,采用光敏三極管接收燈泡發出的光線,當感受到光線照射時,其c-e間的阻值下降,檢測電路輸出高電平,經LM393電壓比較器和74LSl4施密特觸發器整形后送單片機控制。
本系統共設計兩個光電三極管,分別放置在電動車車頭的左、右兩個方向,用來控制電動車的行走方向,當左側光電管受到光照時,單片機控制轉向電機向左轉;當右側光電管受到光照時,單片機控制轉向電機向右轉;當左、右兩側光電管都受到光照時,單片機控制直行。見圖2電動車的方向檢測電路。

2.2 行車方向檢測電路
采用反射接收原理配置了一對紅外線發射、接收傳感器。該電路包括—個紅外發光二極管、一個紅外光敏三極管及其上拉電阻。紅外發光二極管發射一定強度的紅外線照射物體,紅外光敏三極管在接收到反射回來的紅外線后導通,發出一個電平跳變信號。












評論