基于80C51單片機的智能小車設計

此套紅外光電傳感器固定在底盤前沿,貼近地面。正常行駛時,發射管發射紅外光照射地面,光線經白紙反射后被接收管接收,輸出高電平信號;電動車經過黑線時,發射端發射的光線被黑線吸收,接收端接收不到反射光線,傳感器輸出低電平信號后送80C51單片機處理,判斷執行哪一種預先編制的程序來控制玩具車的行駛狀態。前進時,驅動輪直流電機正轉,進入減速區時,由單片機控制進行PWM變頻調速,通過軟件改變脈沖調寬波形的占空比,實現調速。最后經反接制動實現停車。
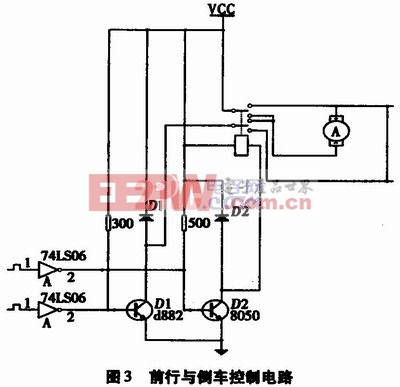
2.3 前行與到車控制
前行與倒車控制電路的核心是橋式電路和繼電器。電橋上設置有兩組開關,一組常閉,另一組常開;電橋一端接電源,另一端接了—個三極管。三極管導通時,電橋通過三極管接地,電機電樞中有電流通過;三極管截止時,電橋浮空。電機電樞中沒有電流通過。系統通過電橋的輸出端為轉向電機供電。通過對繼電器開閉的控制即可控制電機的開斷和轉速方向進而達到控制玩具車前行與倒車的目的,實現隨動控制系統的糾偏功能。圖3為前行與倒車控制電路。本文引用地址:http://www.104case.com/article/173156.htm
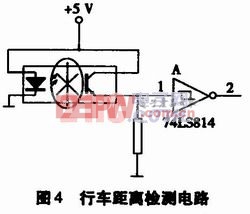
2.4 行車距離檢測
由于紅外檢測具有反應速度快、定位精度高,可靠性強以及可見光傳感器所不能比擬的優點,故采用紅外光電碼盤測速方案。圖4為行車距離檢測電路。
3 顯示電路
本設計中用兩片4位八段數碼管gem4561ae作顯示器,采用新型芯片EM78P458作為顯示驅動器,用單片機的并行口控制,一個數碼顯示電路用4個口線,用專用驅動芯片控制可以減少對CPU的利用時問,單片機將有更多的時間去完成其他功能。
4 電源的設計
本設計的電源為車載電源。為保證電源工作可靠,單片機系統與動力伺服系統的電源采用了大功率、大容量的蓄電池,而傳感器的工作電源則采用了小巧輕便的干電池。












評論