基于PIC單片機的機器人靈巧手的控制系統設計

當代機器人研究的領域已經從結構環境下的定點作業中走出來,向非結構環境下的自主作業方面發展。而機器人靈巧手相當于安裝在機器人臂上的可獨立實現精細操作運動的一組機器人,是真正擬人化并能實現靈活操作的機器人手。他對于提高空間機器人的工作能力具有重要意義,并且將來還可以嘗試將機器人靈巧手用于戰場探雷和排雷、核工業設備的檢測和修理等危險作業[1]。在機器人靈巧手控制方面的研究在國內只有少數的科研機構 進行,而且成本較高。在本文尋求采用一種較為合適的單片機來作為實現控制的核心,基于PIC單片機的強大功能所以采用PIC系列單片機。
本文引用地址:http://www.104case.com/article/172116.htm1PIC單片機特點
PIC 系列單片機是美國Microchip公司出品的8 b微處理器,但是他的速度與功能卻比現在 一些普通8 b的51單片機強很多,因為他采用了RISC結構,有別于過去的一般CISC結構,R ISC結構采用Harward雙總線結構,將地址總線與數據總線分開,因此數據與地址可以同時傳輸,提高了運算速度[2]。 PIC單片機的體積小,功耗低,而且內部集成了多種外圍電路,使設計更加方便,無需在單片機的設計中再添加一些外圍電路,在控制系統中這一點很重要。本文中采用的PIC16C77單片機,他有8 k的程序存貯器;368 B RAM;2個PWM口;內部集成了一個5通道的8 b A/D,具有掉電復位功能,這些特點使得硬件的設計非常方便。在機器人靈巧手的控制中對于微小電機的驅動需要PWM信號來驅動,在傳統的設計中是利用晶體管組成的電路來實現的,普通的51系列單片機中必須利用定時器來產生,而在PIC單片機中內部包含了2個PWM信號輸出端為設計提供了方便。
2控制系統的整體硬件設計
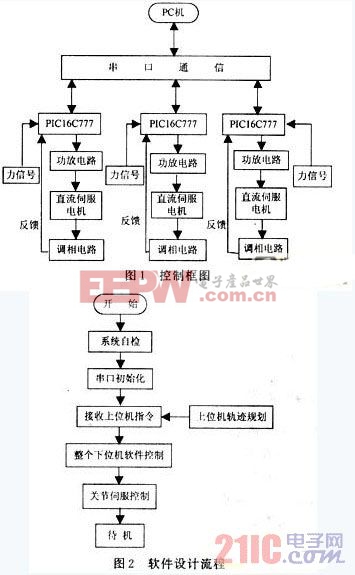
靈巧手在抓取和操作前,要進行被抓物接觸點位置確定、抓取構形分析判斷、三指手正逆解求解、軌跡規劃等復雜運算。這需要很長時間。在抓取和操作過程中,要進行電機轉速控制、關節位置檢測控制、指端力覺檢測等,其中有的控制必須同時進行,因此,本文所設計的靈巧手采用圖1所示的按層次劃分的分級式控制系統。上位機為PC機主要從事主控制作用,進行抓取軌跡規劃,還有對下位機發出操作指令。下位機為3個控制單元與上位機進行多機通訊,接收指令并對反饋信號進行PID調節,控制電機轉動。每個單片機控制一個手指的運動。采用該控制體系的優點是控制方案整體思路比較清晰,控制靈活,達到了設計的要求。
2.1下位機軟件設計
對于單片機在這個系統中的主要作用是接收上位機的指令,控制電機的運轉和手指關節的運動以及對反饋的信號進行PID調節將結果送往上位機,并將采集來的信號送往上位機準備下一次指令的接收。主要流程如圖2所示。
2.2串口通信模塊
對于串口通信主要是采用異步串行傳輸模式,數據的傳輸格式是RS232協議。對于PIC單片機來說對于串口的操作主要是對下面幾個寄存器的操作:TXSTA發送狀態與控制、RCSTA接收狀態與控制寄存器、TXREGUSART發送寄存器、RCREGUSART接收寄存器和 SPBRG波特率產生寄存器。
2.3電機驅動模塊
靈巧手的運動主要通過關節處的電機的運動來控制。三指靈巧手的每個手指有3個自由度 也就說一個手指的運動需要3個電機來驅動。驅動方式采用繩索與滑輪的方式傳動,電機選用了瑞士Maxon公司生產的REmax21直流伺服電機以及與其配套的減速器和編碼盤。
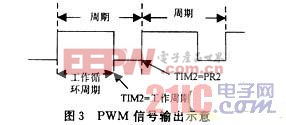
電機的驅動需要PWM信號來驅動,利用PIC單片機本身帶有的PWM信號口,配以功率放大器便 可進行電機的驅動。PWM信號主要是對其內部Time2和2個寄存器的設定:一個是存貯PWM周期的PR2寄存器,一個是存貯工作周期的寄存器CCPRXL[3]。PWM信號輸出示意圖如圖3所示。
當Time2剛開始工作時,PWM輸出端為高電平,此后Time2會和PR2,CCPRXL兩個寄存器比較,當Time2等于CCPRXL中的設定值時引腳輸出變為低電平,當Time2計數到與PR2中的數相等時,此時引腳輸出變為高電平,Time2便會歸零重新計數,這就是PWM信號的輸出過程。在PW M信號的輸出端連接功放電路,采用L298芯片實現單極性可逆驅動,單片機生成的PWM脈寬調制信號直接由L298雙H橋PWM驅動器驅動,L298是一種高電壓大電流功率放大芯片。驅動電壓可達46 V,直流電流總和可達4 A,直接采用TTL邏輯電平控制。
2.4A/D模塊
對于信號的采集部分,由于PIC單片機內部集成了一個5通道的8 b A/D,因此無需外接A/D ,直接應用即可。內部A/D的使用主要是對ADCON0,ADCON1, ADRES三個寄存器的設定。
3控制算法
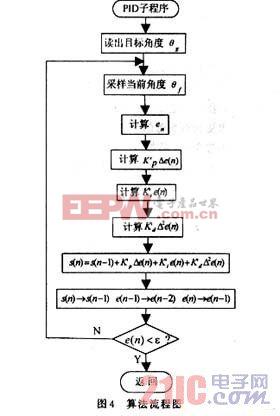
在工業控制中PID算法是一種很常用的算法,一般的8 b單片機運行該算法時速度會受到穎響,對于系統的控制有著一定的時延特性,但是基于PIC單片機的結構和高速特性,這一點可以克服[4]。對于PID在本系統中對于該算法的軟件流程圖如圖4所示。
4結語
采用PIC單片機設計的三指靈巧手較好地完成了抓取實驗,所有的硬件設計比普通的8 b 單片機更為簡潔,系統更為穩定,操作簡單。相比較利用專用的集成驅動電路和高性能的數 字信號處理器組成的系統,采用該方案成本更小,整體的性能也相當好。
參考文獻
[1] Okada T.An artificial finger equipped with adaptability to an object Bullelectrotechlab, 1974,37 (2):1078-1090.
[2]武鋒.PIC系列單片機的開發應用技術[M].北京:北京航空航天大學出版 社,2000.
[3]何信龍,李雪銀.PIC16C7X入門與應用范例[M].北京:清華大學出 版社,2001.
[4]王曉明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2002.











評論