基于AVR單片機的自由立體顯示背光控制系統

對于模型參數Q11,Q22和R,由PC機輔助計算得到。給定一組測量位置和實際位置,在Q11,Q22,R三維空間按等量的方法選取格點,分別訓練不同參數下的Kalman濾波器對檢測數據進行濾波,如果濾波后的位置與真實值越接近,就說明這組濾波器參數越優秀。得到了最優參數后,就可以按照前面的介紹,進行不斷“預測一修正”的Kalman濾波,獲得精度更高的人眼位置(式(8)),并利用式(5)預測t/2時間后的人眼位置,此時增益矩陣:
1.3 系統的總體方案設計
自由立體顯示系統由計算機、RS 232通信電路、單片機控制電路、驅動電路和LED照明陣列電路組成,結構框圖如圖3所示。本文引用地址:http://www.104case.com/article/171894.htm

上位機完成人眼檢測算法,并且把人眼位置信息通過RS 232送給單片機。單片機選擇AVR系列中功能最強的ATmega128,主要完成對人眼位置數據的處理,然后按照一定的時序發送給驅動芯片。控制電路更新LED照明陣列時,按地址逐個發送數據“1”或“0”,控制每一列LED的點亮與否。
2 硬件設計
2.1 驅動電路
根據背光源亮度恒定的要求,LED陣列的驅動采用聚積科技生成的16位恒流LED驅動芯片MBI5026,其內建的CMOS移位緩存器與栓鎖功能,可以將串行輸入的數據轉換成并行輸出的格式,電流的輸出值可以通過一個外接電阻進行調整,高達25 MHz的時鐘頻率可以滿足大量數據傳輸的要求。
2.2 控制電路
ATmega128是ATMEL公司推出的一款8位RISC結構高速低功耗單片機,在16 MHz時鐘頻率時系統性能可達16 MIPS,內帶128 KB的FLASHRO M,4 KB的E2PROM、4 KB系統SRAM;可擴展64 KB外部存儲器;兩個8位定時器/計數器,兩個16位定時器/計數器;兩路UART通信口,可工作在異步或同步方式。在與上位機通信的過程中,需要采用MAX232電平轉換芯片將PC機串口輸出的RS 232電平轉換成單片機能接受的TTL電平。
3 軟件設計
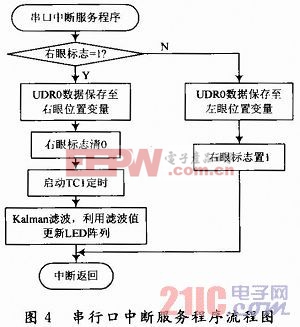
軟件設計的總體思路是PC機檢測到人眼的位置信息,給出左眼的位置數據和右眼的位置數據,單片機在得到這兩個數據后,啟動TC1開始t/2時間的定時,同時開始Kalman濾波,使用由式(8)得到的濾波值刷新LED照明陣列。定時器中斷服務處理程序主要包括清零TCCR1B以停止定時器,按照t/2時刻人眼位置的預測值刷新LED照明陣列。這樣,在人眼檢測速率為每秒25幀的情況下,可以將LED的刷新速率提升到每秒50次,有效減輕了可視區域隨觀察者位置變化而帶來的跳躍感。
程序實現對系統的初始化,包括I/O端口的初始化、TC1的初始化、中斷設置、串行口工作方式選擇、各種變量的初值裝入。波特率設置為115 200 b/s,數據格式采用8位數據位,1位起始位,1位停止位。初始化完成后,程序進入等待狀態,若上位機發送數據,則進入相應的串行口中斷服務處理程序,如圖4所示。












評論