一種智能小車機器人設計方案

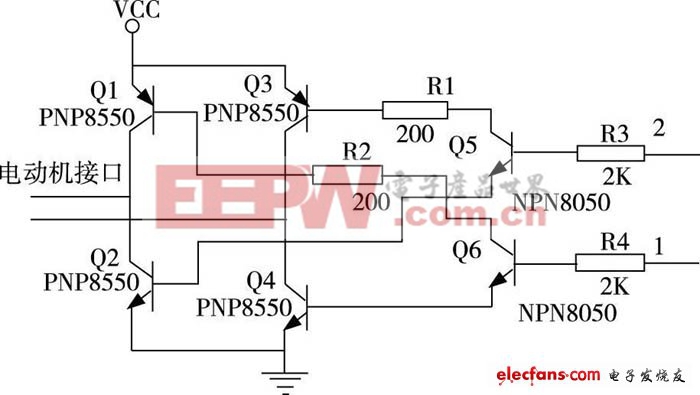
圖5 驅動電路。
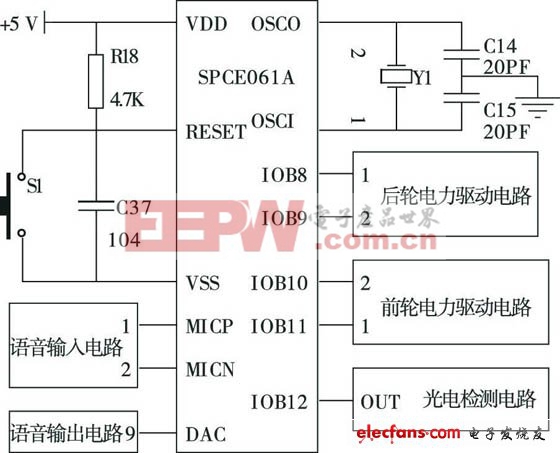
將語音輸入電路的1, 2 端口分別連接到SPCE061A控制器的M ICP, N ICN 管腳上; 將語音輸出電路的9端口連接SPCE061A的DAC1管腳; 后輪動力驅動電路的1, 2端連接到SPCE061A的IOB8, IOB9管腳, 前輪方向驅動電路的1, 2端連接到SPCE061A 的IOB10, IOB11管腳; 光電檢測電路的OUT 端連接SPCE061A 的IOB12 管腳, 智能小車的整體連接如圖6所示。
智能小車的軟件系統主要采用語音辨識技術控制小車的自動行駛, 從而實現了無需手工操縱, 就能人車的互動, 智能控制算法如圖7所示。軟件的設計采用C語言編寫, 這樣可以使程序代碼簡介易讀, 另外程序的設計還使用了SCPE061A的定時中斷技術, 當光電檢測電路檢測到前方有障礙或有停車指令觸發時, SCPE061A立即作中斷處理使小車停車。
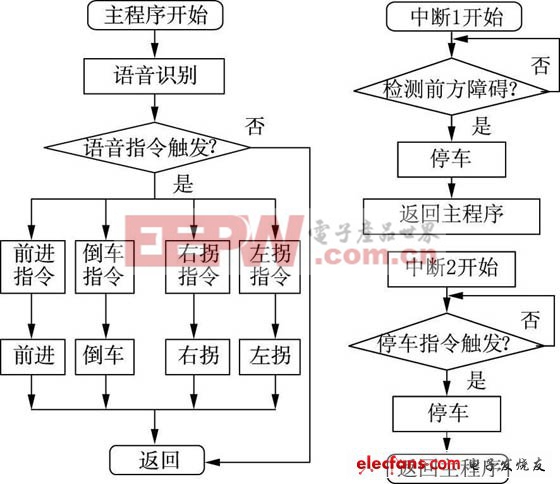
圖7 智能算法框圖。
智能小車的軟件設計核心就在于語音辨識, 語音辨識主要分為訓練和辨識( 圖8) .在訓練階段, SCPE061A 控制器首先對說話人的語音進行模/數轉換、預加重、自動增益控制等處理, 實現語音數字信號的數字化,然后對處理后的語音信號進行特征提取, 建立語音特征模型, 訓練過程主要靠語音函數庫bsrv222SDL. lib中的BSR_Tra in( )函數來完成。在辨識階段SCPE061A 控制器對采集到的語音進行同樣的分析處理, 提取出語音的特征信息, 然后將這個特征信息與已有的特征模型進行對比, 如果兩者達到一定的匹配度, 則輸入的語音被識別, 辨識過程主要靠語音函數庫bsrv222SDL. lib 中的BSR _InitRecogn izer( )、BSR_EnableCPUIncato r( )、BSR_GetResult( )、BSR_S topRecogn ize r( )函數來完成。
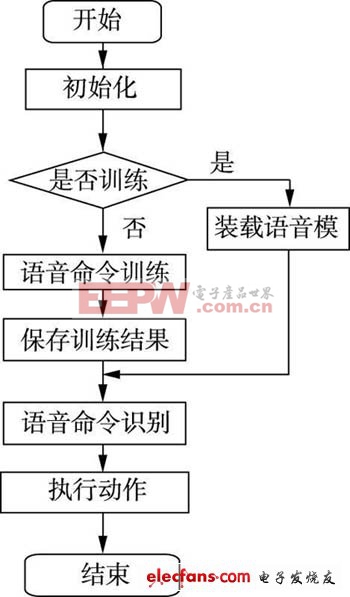
圖8 語音辨識程序流程圖
5 結語
實驗中智能小車的正確識別率在90% 以上, 實驗過程中發現, 影響小車正常辨識的因素主要包括周圍環境的噪聲、人與小車的距離等, 這些需要在今后改進。這種語音控制的智能小車機器人將來不僅可以為人服務, 稍加擴展, 還可以在多種不適合人作業的場合替代人執行任務。因此這種語音控制小車機器人具有重要的學術研究價值。









評論