通過優化PWM算法提高智能微控制器控制性能解析方案

聯合使用定時器TA0~TA3和定時器TB0可以產生驅動三相馬達的電壓波形。M37906內部集成的三相馬達驅動的工作方式答為三相波模式,用于實現三相波形的輸出。三相正相波形(U相、V相、W相)和三相負相波形(UN相、VN相、WN相),分別從P65、P65、P64、P63、P62、P61和 P60輸出,P6OUTcut/INT4作為智能模塊的故障檢測口。定時器TA3按定時方式工作,用于控制載波周期;定時器TA0~TA2按單次脈沖方式工作分別控制各輸出相。其中定時器TA0控制W和WN相,定時器TA1控制V和VN相,定時器TA2控制U和UN相。
定時器TA3用于控制三角調制波或鋸齒波的周期。當定時器TA3記數器向下溢出時,產生中斷請求,發出一個短脈沖使定時器TA0~TA2開始記數;同時三相輸出極性設置寄存器(00A8H)的相應位分別觸發各自對應的輸出極性設置翻轉觸發(toggle flipflop)器,設置其輸出的極性,觸發器的內容在定時器TA0~TA2觸發時反向;定時器TA0~TA2在觸發極性設置翻轉觸發器的同時也觸發死區時間定時器使之開始工作。此時正相和負相輸出波形并不能馬上從高電平轉到低電平,只有死區時間定時器溢出后,所發出的反向觸發信號才使輸出從高電平轉到低電平。
在輸出波形時,設置死區時間的目的是防止正向波形(U相、V相、W相)輸出低電平和負相波形(UN 相、VN相、WN相)輸出低電平時互相重疊,因為正相和負相同時為低電平時會造成驅動電路短路。M37906內部提供了3個以單次脈沖有方式工作的八位定時器完成對死區時間的控制。它們共用一個設定死區時間的重加載寄存器,在設定死區時間寄存器(00A7H)時也同時自動加載到共用的重加載寄存器中;每次觸發死區時間定時器時微處理器會重新加載該寄存器中的值,按選擇的記數源進行減記數;當記數器下溢時,記數器停止工作,等待下一次觸發。
M37906 具有兩種三相PWM方式,即三相PWM方式0和三相PWM方式1。在方式0中每次定時器TA3溢出都會產生中斷請求;定時器TA0~TA2各使用一個寄存器,通過設定U、V、W各相的輸出極性設置緩沖的方法使輸出極性反向,也可以通過軟件方法直接使三相輸出反向。而三相波形方式1中定時器TA3每兩次或每四次向下溢出才會產生中斷;每個定時器交替使用兩個寄存器,只能通過設置三相輸出波形的極性寄存器實現三相波的極性設置;在每個周期內根據三相輸出極性設置緩存器的內容由硬件自動完成的三相波極性的反向。
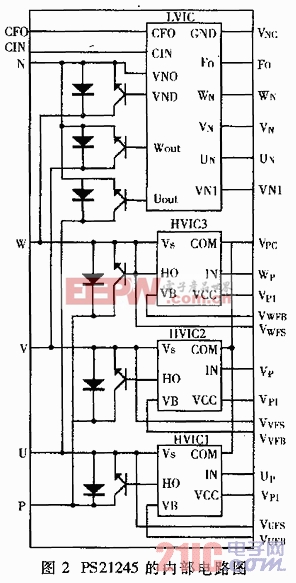
2 PS21245智能功率模塊
DIP -IPM模塊是日本三菱公司最新推出的第四代IPM智能功率模塊。IPM智能功率模塊是集內置三相交流輸出IGBT逆變電路、高壓驅動程序保護于一體的雙列直插封裝模塊。其內部既有驅動控制和保護邏輯,又有過流、過(欠)壓、短路和過熱探測和保護電路,大大提高了變頻器的可靠性和可維護性。DIP-IPM 模塊與第三代IPM智能功率模塊相比具有以下特點:只需一路+15V的驅動電路,可不采用光耦直接與單片機進行連接,工藝上采用了更小的 IGBT/FWDi芯片,使功耗更低、體積更小。PS21245的每路IGBT集電極電流為20A,開關頻率典型值5kHz,絕緣耐壓1500Vrms,集電極-發射極額定電壓600V,其內部電路如圖2所示。

pwm相關文章:pwm原理











評論