基于瑞薩單片機自動尋跡智能車的設計

3. 2 速度控制算法
智能車控制算法采用PID算法,包括3個部分:測量、比較和執行,即把測量得到的量與期望值相比較,然后用合格誤差糾正調節控制系統的響應。PID控制算法是建立在經典控制理論上的一種控制策略。PID控制算法能夠在保證不影響系統穩定精度的前提下提高系統的穩定性,并改善系統的動態性能。根據實驗情況和現場調試經驗,小車在直線運動時不進行PID控制,以最大速度運動,處于一般彎道狀態時則引入PID算法,這樣可以根據實際情況調節速度,使小車具有良好的可控性。PID控制器原理框圖如圖3所示。本文引用地址:http://www.104case.com/article/170526.htm
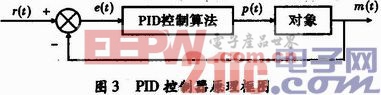
系統主要由PID控制器和被控對象組成。它根據給定值r(t)與實際輸出值m(t)構成控制偏差,將偏差按比例、積分和微分通過線性組合構成控制量,對被控對象進行控制。
PID的圖形表達式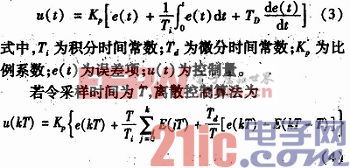
式(4)中,T是采樣周期,必須足夠小,以保證系統有一定的精度;Ti為調節器的積分時間;Td為調節器微分時間;Kp為調節器的比例系數;e(k)為第k次采樣時的偏差;u(k)為控制量。
采用增量式PID進行控制,由△u(kT)=u(kT)-u(kT-T),可得
△u(kT)=Kp[e(kT)-e(kT-T)]+Kie(kT)+Kd[e(kT)-2e(kT-T)+e(kT-2T)] (5)
式中,e(kT)為第k次與中心位置的偏差程度;e(kT-T)、e(KT-2T)分別為k-1、k-2次誤差項。以此算法為基礎,用C語言編寫出控制算法程序。
3.3 程序設計
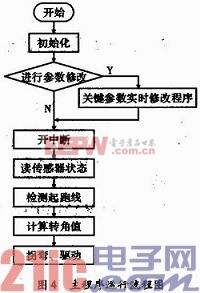
主程序采用周期性檢測控制思想。每隔20ms檢測1次引導線、車速及加速度數據,根據程序處理結果調用舵機控制程序和驅動電機控制程序,對智能車的運行狀態進行實時控制,以完成循線運行的要求。主流程圖如圖4所示。
4 結束語
智能車設計涵蓋了自動控制、電子等多個學科,其技術可被應用到智能機器人、自動化作業平臺等領域,具有較強的實用性。論文結合實際設計經驗,從智能車的硬件設計、軟件設計等方面討論了智能車的設計。試驗證明,用PID算法即使在路面導引線復雜的情況下,也能較好地保證智能車沿正確的方向前進,以及運行的平穩性。

pid控制相關文章:pid控制原理
手機電池相關文章:手機電池修復
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
pid控制器相關文章:pid控制器原理
電流變送器相關文章:電流變送器原理










評論