基于瑞薩單片機自動尋跡智能車的設計

2.4 電機驅動模塊
電機驅動板為一個由分立元件制作的可逆雙極型橋式驅動器,其功率元件由4支n溝道功率MOSFET管組成,大幅提高了電動機的工作轉矩和轉速。該驅動器主要由以下部分組成:PWM信號輸入接口、邏輯換向電路、死區(qū)控制電路、電源電路、上橋臂功率MOSFET管柵極驅動電壓泵升電路、功率MOSFET管柵極驅動電路、橋式功率驅動電路、緩沖保護電路等。通過設置HS/3048F輸出的PWM波的盼占空比可以實現(xiàn)控制電機正反轉。當輸出的占空比為50%時,電機不轉,當占空比>50%時,電機正轉;50%則反轉。
2.5 測速模塊
為提高檢測精度,本模塊最后確定為使用精度較高的光電編碼器。光電編碼器使用5 V電源,輸出方波信號,具有質量輕、可靠性高、安裝簡單等優(yōu)點。
3 算法及軟件設計
3.1 方向控制算法
智能車方向的控制采用對預定軌道的閉環(huán)控制,即輸出方向和測得的白線位置成分段比例關系。舵機的轉角公式為
θ=arctan(e/b) (1)
式(1)中,θ為舵機的轉角;e為偏移量;b為前軸到傳感器間距。
通過實驗可得舵機的轉角與PWM脈寬呈線性關系,轉向公式為
PWM=θ×K+M (2)
式中,K為比例系數(shù);M對應于舵機位沒有發(fā)生偏轉時的PWM控制脈寬。實驗證明,在一定范圍調節(jié)K,可以起到良好的控制效果。
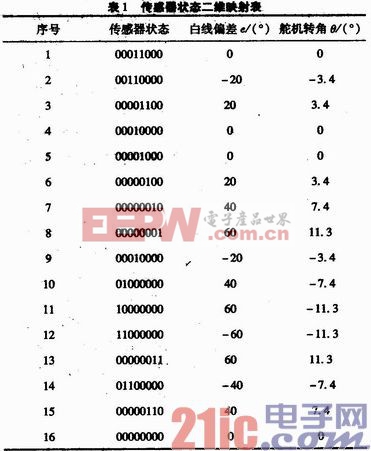
智能車檢測到的路面情況有16種狀態(tài),其中每種狀態(tài)都有一個舵機轉角與之對應。這樣就可以在程序中創(chuàng)建出每種傳感器狀態(tài)中對應的白線偏差e與舵機轉角θ之間的關系,如表1所示。本文引用地址:http://www.104case.com/article/170526.htm

pid控制相關文章:pid控制原理
手機電池相關文章:手機電池修復
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
pid控制器相關文章:pid控制器原理
電流變送器相關文章:電流變送器原理










評論