基于精確定位的井下運輸信集閉系統的研究

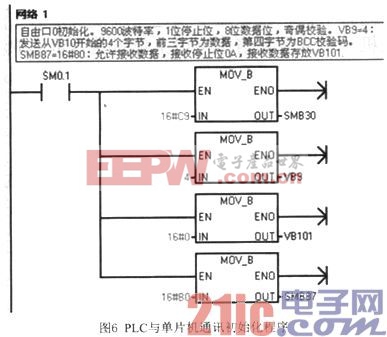
PLC把數據分為2個部分,前一部分3個字節,存放道岔數據,在每個字節中,以2個bit表示一個道岔編號,值為10時表示該道岔在定位狀態,01時表示道岔在反位狀態,這樣每個字節就可以表示4個固定道岔的位置信息,11個道岔用3個字節就能表示。如首字節為10100101,即第一個字節為0xA5,這時道岔1D、2D、3D和4D分別同時處于定位、定位、反位和反位狀態,依次類推:第二部分為第四個字節,為校驗位,本設計采用BCC校驗,將前三字節異或后,一并發送,在接收方經過解析校驗。
單片機主要完成接受道岔送左信息,給電動轉轍機發出動作信號。本文引用地址:http://www.104case.com/article/170483.htm
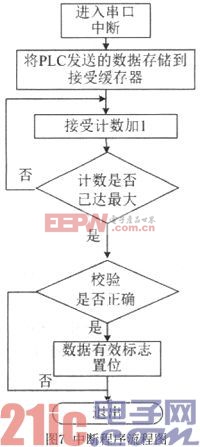
單片機控制程序以接收中斷方式判斷是否有來自PLC的數據。當確實收到PLC給出的含道岔編號及要求道岔定位或者反位的信息時,需對這一信息進行解析校驗,并向PLC返回一校驗結果,解析正確后控制電動轉轍機執行。圖7中斷程序流程圖
4 上位機設計
上位機主控畫面是對整個機車運行系統的真實再現,調度員在調度室內就能實時了解機車運行狀態信息,隨時對現場設備進行控制。
機車司機通過語音通信給調度員發送機車行車要求,調度員根據整體運行情況,合理確定行車區間。
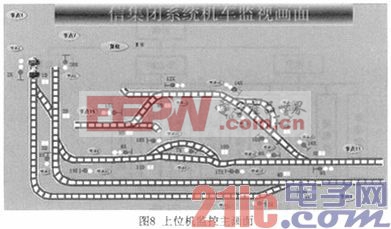
除此之外,還可以通過上位機查詢機車的實時運行狀態,報警提示等。通過上位機監控畫面,調度員能全面掌握井下機車運行狀態,增強對突發事件的處理能力,實現電機車高效、安全、流暢的運行。圖8給出了上位機監控主畫面。
5 結論
本文針對煤礦綜合自動化的需求,運用了機車精確定位技術、計算機控制技術、通信技術等,并且運用了無線語音通信功能,填補了信集閉系統的空白點。
本系統對機車定位準確,進路判斷快速,區間閉鎖嚴格有效,電機車運行有序、流暢,對煤礦井下特殊條件下的軌道運輸系統有一定的指導意義。












評論