基于精確定位的井下運輸信集閉系統的研究

摘要:文章借鑒現有信集閉系統的研究成果,并參考煤礦實際運輸情況,提出并完成了基于精確定位的井下運輸信集閉系統的研究。精確定位系統通過測量機車任意時刻下的加速度值,進而計算出電機車的運動速度和位置,實現定位功能。信集閉系統以西門子PLC、AVR單片機為控制核心,充分利用了單片機和PLC的控制優點,提高了系統的定位精度,實現了實時性和準確性控制。
關鍵詞:信集閉系統;PLC;單片機;以太網通信;機車精確定位
0 引言
電機車是煤礦井下重要的運輸設備之一,擔負著煤炭、矸石、人員和物料的運輸任務,既對礦井生產效率影響較大,又存在著較大的安全隱患。因此,對機車運輸的監控在煤礦生產綜合監控中占有重要地位。
本論文設計的基于精確定位的井下運輸信集閉系統,機車定位精度高、且能實現井下電機車運輸系統信號集中閉塞,并能夠通過數據傳輸通道進行數據通訊,保證系統具有更高的可靠性。
1 系統總體方案設計
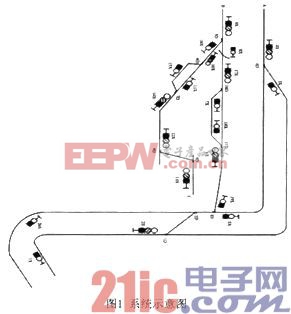
圖1為實際系統示意圖,有多條進路,井下環境復雜。為實現對電機車運輸的自動化調度,系統必須兼備控制與檢測兩種基本功能,控制功能指在收到調度員包含車號及機車行駛的起始終了地址指令后,通過判斷進路是否可以開放,自動跟蹤進路并自動控制開放信號機。檢測功能則需要分站將機車的精確位置、速度、信號機開放顏色及道岔位置反饋給主站上位機。
本設計把系統分為三大部分:
(1)機車精確定位系統。監測電機車車號、位置,及時了解機車運行狀態;
(2)信集閉系統。PLC作為主控器,主要有檢測、控制和通訊功能;
(3)上位機監控系統。顯示行車位置,調度機車,控制行車區間。
2 機車精確定位系統
該系統采用基于捷聯慣性導航定位方法,取代了原有的軌道電路及傳感器系統,既能監測電機車車號、位置,又能及時了解機車運行狀態,對于煤礦安全生產和提高工作效率就顯得十分重要。
2.1 機車精確定位系統的結構
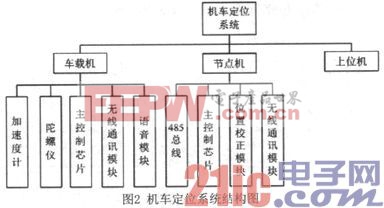
機車定位系統利用固連在電機車車載機上的加速度傳感器和陀螺儀,采用捷聯慣性導航算法,通過測量電機車任意時刻下的加速度值和角速度值,通過積分、微分、矩陣乘法等運算計算出物體姿態、速度和位移,進而確定電機車的速度及位置,實現定位功能。與傳統的傳感器系統相比,可靠性好、靈敏度高,且裝載語音通信功能,能方便及時地與調度溝通。結構圖如圖2所示,系統主要由車載機、節點機、上位機三部分組成。
2.2 機車精確定位系統原理
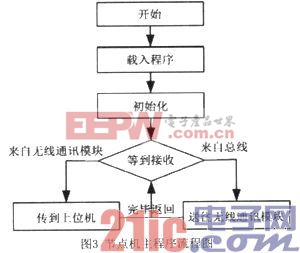
節點機首先對單片機端口、各寄存器功能、語音芯片等可編程芯片進行初始化。然后等待接收數據并判斷數據來源,執行相應的任務。節點機主程序如圖3所示。












評論