高控制/運(yùn)算效能助力 MCU實現(xiàn)智能照護(hù)機(jī)器人

利用晶片使機(jī)器人進(jìn)行追蹤,由超音波偵測距離,讓主系統(tǒng)判斷老人的位置,并命令馬達(dá)動作,使機(jī)器人能進(jìn)行跟隨,可隨時跟在老人的身邊,注意是否有突發(fā)狀況發(fā)生,揮揮手就能與家人視訊通話等功能。
PING超音波距離感應(yīng)器用于測量與物體間的距離,范圍介于3cm?3.3m,容易裝置于機(jī)器人或自動設(shè)備上。超音波感測器利用脈波產(chǎn)生,透過聲波喇叭進(jìn)行一發(fā)一收的動作來得到訊號的時間長短,也就是感測器發(fā)送訊號至物體而反射后所經(jīng)過的時間,在經(jīng)過運(yùn)算后即能得到精準(zhǔn)的距離。為實現(xiàn)追蹤功能,超音波定位追蹤方法利用主系統(tǒng)晶片產(chǎn)生脈波與判斷,使超音波能自動追隨物體,也更加穩(wěn)定照護(hù)功能。
為可負(fù)載生活必需品,因此行走動力來源選擇扭力較大的馬達(dá)(IG-30GM)做為驅(qū)動,搭配耐高電流的12伏特(V)馬達(dá)驅(qū)動晶片(HB-25)來控制直流馬達(dá),控制方式為脈波的寬度調(diào)變,控制兩顆馬達(dá)的正反轉(zhuǎn)、時間差和轉(zhuǎn)動速度等參數(shù),晶片扮演重要的行動控制機(jī)能,車體的前進(jìn)、后退、轉(zhuǎn)彎等動作。
.Kinect骨架判斷
Kinect透過鏡頭即時擷取使用者的動作,之后并會接著解析相對應(yīng)的指令。透過內(nèi)建的紅外線VGA鏡頭發(fā)出主動式雷射,在Kinect可掃描的范圍內(nèi)藉由雷射反射過程判斷使用者位置,當(dāng)使用者的身體部位識別完畢后,Kinect會將所擷取到的資料整理成一組骨架圖,藉此對應(yīng)于相關(guān)應(yīng)用。
使用Kinect本身的骨架辨識功能,能模擬出老人的骨架,讓主系統(tǒng)監(jiān)控骨架與動作,判斷骨架是否出現(xiàn)或是下降;判斷特定動作,啟動特定的功能,如圖3為人體進(jìn)入Kinect范圍時會出現(xiàn)骨架識別,進(jìn)而做出不同指令動作。
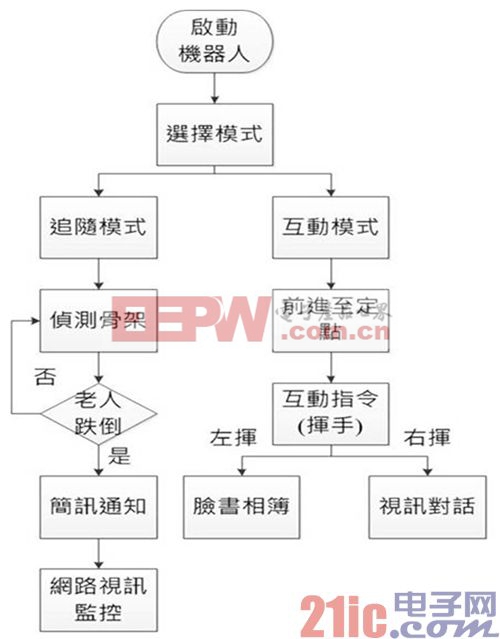
圖3 機(jī)器人動作流程圖
.緊急簡訊傳送
當(dāng)老人發(fā)生跌倒時,主系統(tǒng)接受跌倒指令數(shù)值判斷出Kinect所勾勒出的骨架是否下降或消失,并透過緊急簡訊功能,立即發(fā)送簡訊至子女的手機(jī)進(jìn)行通知,家人在查看到簡訊后能立即開啟網(wǎng)路視訊服務(wù),可于第一時間了解家中老人的狀況,并與老人進(jìn)行對話。
此外,簡訊功能可指定手機(jī)號碼,且更改緊急聯(lián)絡(luò)人十分方便。
.臉書動態(tài)/互動視訊服務(wù)
當(dāng)老人需要照護(hù)機(jī)器人進(jìn)行觀看在外子女的動態(tài)或聯(lián)絡(luò)時,可透過手勢辨識,呼叫照護(hù)機(jī)器人過來至身旁,機(jī)器人可透過手勢動作判別進(jìn)行臉書動態(tài)服務(wù),可觀看子女在外打卡或上傳照片,也可利用網(wǎng)路攝影機(jī)及網(wǎng)路視訊功能與在遠(yuǎn)方子女進(jìn)行視訊對話,隨時知道彼此的消息。
執(zhí)行完整測試項目 機(jī)器人實現(xiàn)更安全老人照護(hù)
圖3為該系統(tǒng)的動作流程圖,以微控制器(MCU)做為核心控制(圖4),進(jìn)行數(shù)值運(yùn)算與即時反應(yīng),利用微控制器的高運(yùn)算處理速度來即時完成所有數(shù)值接收與指令,讓機(jī)器人不會因延遲而導(dǎo)致行動不順暢。
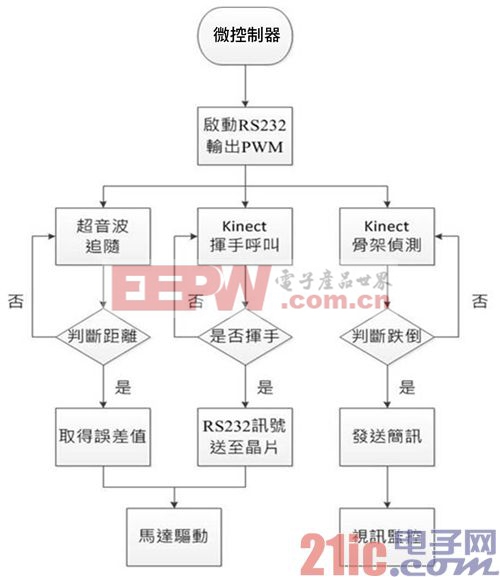
圖4 微控制器動作方塊圖
主系統(tǒng)晶片還須與其他硬體結(jié)構(gòu)說明,以主系統(tǒng)晶片出發(fā),達(dá)到所有模組相互結(jié)合的應(yīng)用,進(jìn)而完成智慧型照護(hù)機(jī)器人的設(shè)計與實現(xiàn)。在實作過程中須進(jìn)行仔細(xì)調(diào)整與測試的項目,包括直流馬達(dá)驅(qū)動控制、超音波定位角度追蹤、Kinect指令動作方向和機(jī)器人追隨安全距離。
.直流馬達(dá)驅(qū)動控制
為讓本系統(tǒng)達(dá)到行動照護(hù),所以直流馬達(dá)是必定需要的,并使用馬達(dá)驅(qū)動器,控制起來只須調(diào)整脈沖寬度調(diào)變(PWM),以及馬達(dá)的正反轉(zhuǎn)、時間差和轉(zhuǎn)動速度等參數(shù),就能讓照護(hù)機(jī)器人行動起來更加順暢(圖5)。

圖5 直流馬達(dá)測試及建置
利用測試方法讓馬達(dá)得以進(jìn)行正反轉(zhuǎn)動作,再將完成的馬達(dá)驅(qū)動置于該作品底座,里頭包含自行設(shè)計的電路板、配置電源及最重要的馬達(dá)驅(qū)動器等。










評論