帶跟瞄功能的視覺眼孔通信模型研究

1 引言
本文引用地址:http://www.104case.com/article/167005.htm一般機器人具有視覺、力觸覺,而發射眼孔波的視覺機器人幾乎未見報導。機器人視覺識別和發射眼孔波之后,按眼孔波信息,機器人力觸覺傳感器可以進行相應動作。用視覺進行識別,用眼孔波發射信息。
眼孔可以發出眼孔波,眼孔波含有信息,據此首次提出機器人視覺系統眼孔波通信框架,以下簡稱眼孔波通信框架,這種眼孔波通信跟瞄數學上同時給出其數學表達。
眼孔波信息傳送可以用大氣激光通信系統在機器人中的應用方法實現。眼孔波握手的方法:
1、 發起者開始捕獲序列,發出眼孔波,它的位置和特性被接收者捕獲、跟蹤、瞄準。
2、 接收者回答,發出眼孔波,他的位置和特性被發起者捕獲、跟蹤、瞄準。
3、 發起者開始眼孔波數據傳輸。
機器人視覺可以同時使用眼孔波通信方法,本文該技術開辟了視覺光通信的新階段。本文將小型大氣光通信系統引入機器人視覺系統中,并通過研究自動捕獲,使視覺通信實現自動化,發射接收端可以實現雙向通信,從眼孔波自動獲取短距離信息以操縱機械手工作。
2 捕獲方法:信標光捕獲研究
在捕獲過程中激光器或探測器應當覆蓋不確定區域,當激光束被接收端探測到時,開始時有一個初始瞄準誤差,為了能夠開始通信,它應當被減少至所需的瞄準誤差。在發射端和接收端可以采用基于角度分析的多種捕獲方法[1-2],在測量距離為Z的條件下,根據靶面尺寸正態瑞利分布特性,本文提出從尺寸角度將捕獲分成兩種方法見圖1、圖2:
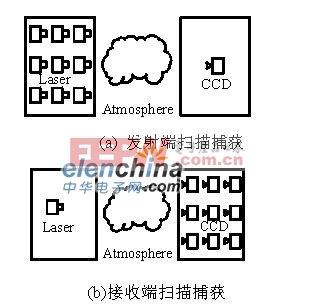
圖1 捕獲方法
捕獲見圖2:

圖2 Yu捕獲示意圖
關于手動捕獲:對遠處的通信機進行視覺眼孔觀察信標光捕獲。在一定角度或靶面尺寸范圍內進行。
關于自動捕獲:對遠處的通信機進行自動信標光捕獲。在一定角度或靶面尺寸范圍內進行。
1、發射端掃描捕獲方法
當第一階段無法捕獲時,保持FPA(CCD)接收端不動,發射端用發散角狹窄的信標光激光束在不確定的區域掃描。在捕獲距離為Z的條件下,捕獲時間依賴于不確定區域尺寸對可探測光束尺寸的比例乘以在每個點的滯留時間。由于不穩定抖動的影響,為了增加額外的邊際安全,搜索過程在掃描區域之間存在著交迭,光束發散尺寸被交迭的因子修正。當信標光激光束被接收端探測到時,開始時有一個初始瞄準誤差如圖1(a) 所示。此時捕獲取景完成。
2、接收端掃描捕獲方法
保持發射端的信標光激光束不動,FPA(CCD)接收端在不確定的區域掃描視場。在捕獲距離為Z的條件下,捕獲的時間依賴于不確定區域尺寸對可探測光束尺寸的比例乘以在每個點的滯留時間。由于不穩定抖動的影響,為了增加額外的邊際安全,搜索過程中在掃描區域之間存在著交迭,光束發散尺寸被交迭的因子修正。當信標光激光束被接收端探測到時,開始時有一個初始瞄準誤差如圖1(b) 所示。此時捕獲取景完成。



評論