PAL一體化攝像機(jī)設(shè)計(jì)

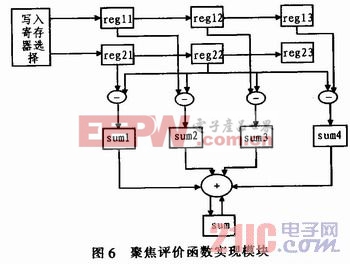
圖6為聚焦評(píng)價(jià)函數(shù)實(shí)現(xiàn)模塊。圖中,聚焦評(píng)價(jià)函數(shù)實(shí)現(xiàn)模塊讀取的2行數(shù)據(jù),由寫入寄存器選擇模塊來選擇中心像素所在行,寫入第2列寄存器。在時(shí)鐘同步作用 下,每時(shí)鐘將像素右移進(jìn)入下一個(gè)寄存器,同時(shí)寄存器regll,regl2,regl3,reg2l中的數(shù)據(jù)同reg22中的數(shù)據(jù)作減法,取得差值 suml、sum2、sum3、sum4,相加得到和sum。當(dāng)一幀圖像結(jié)束,sum中的數(shù)據(jù)成為該幀的亮度差值和。當(dāng)前幀計(jì)算的結(jié)果與前一幀的計(jì)算結(jié)果 相比較,若當(dāng)前幀的函數(shù)值大于前一幀的函數(shù)值,說明當(dāng)前圖像比前一幀圖像清楚,則輸出結(jié)果OUT為'1’,反之則輸出'0’。本文引用地址:http://www.104case.com/article/166316.htm
采用爬山搜索算法確定光學(xué)聚焦位置。在自動(dòng)聚焦使能信號(hào)有效后,驅(qū)動(dòng)馬達(dá)從初始位置正轉(zhuǎn)8步,反轉(zhuǎn)8步,然后再反轉(zhuǎn)8步,正轉(zhuǎn)八步,回到初始位置。每轉(zhuǎn)1 步檢測(cè)聚焦評(píng)價(jià)函數(shù)模塊的輸出out值,將4個(gè)8步內(nèi)檢測(cè)到‘1’的個(gè)數(shù)分別保存為suml、sum2、sum3 sum4,接下來進(jìn)行統(tǒng)計(jì)分析,如果suml≥16,則認(rèn)為正轉(zhuǎn)方向?yàn)榫劢狗较颍蝗魋um2≥6則認(rèn)為反轉(zhuǎn)方向?yàn)榫劢狗较颍蝗绻鹲uml、sum2都未大 于等于6,則計(jì)算suml+sum4和sum2+sum3;如果suml+sum4≥sum2+sum3,則認(rèn)為正轉(zhuǎn)方向?yàn)榫劢狗较颍駝t認(rèn)為反轉(zhuǎn)方向?yàn)?聚焦方向。確定出聚焦方向后驅(qū)動(dòng)步進(jìn)馬達(dá)帶動(dòng)鏡頭向聚焦方向一步一步轉(zhuǎn)動(dòng),每轉(zhuǎn)一步檢測(cè)聚焦評(píng)價(jià)函數(shù)算法模塊的輸出OUT值,若連續(xù)轉(zhuǎn)的2步輸出out都 為‘0’,則認(rèn)為超過最清晰位置,則驅(qū)動(dòng)步進(jìn)馬達(dá)倒退2步,鏡頭達(dá)到最佳聚焦位置。
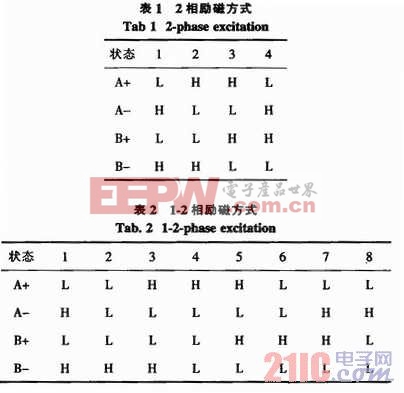
步進(jìn)馬達(dá)驅(qū)動(dòng)包括變焦馬達(dá)驅(qū)動(dòng)和聚焦馬達(dá)驅(qū)動(dòng),變焦馬達(dá)實(shí)現(xiàn)變倍,聚焦馬達(dá)用來聚焦。變焦馬達(dá)和聚焦馬達(dá)的勵(lì)磁方式不同,變焦馬達(dá)采用2相勵(lì)磁方式,見表 l。聚焦馬達(dá)采用的是1.2相勵(lì)磁方式,見表2。其中A+、A-分別代表A相繞組正端和負(fù)端功率橋控制信號(hào),B+、B-分別代表B相繞組正端和負(fù)端功率橋 控制信號(hào)。按照表中所示的電平信號(hào),外加在步進(jìn)馬達(dá)的兩組線圈上,利用線圈間脈沖的相位差產(chǎn)生的扭矩來驅(qū)動(dòng)馬達(dá)步進(jìn)工作。按照表中所示的脈沖順序,從左向 右變化可實(shí)現(xiàn)步進(jìn)馬達(dá)的反轉(zhuǎn);反之則實(shí)現(xiàn)正轉(zhuǎn)。以變焦馬達(dá)驅(qū)動(dòng)為例,在FP-GA內(nèi)設(shè)計(jì)一個(gè)狀態(tài)機(jī),實(shí)現(xiàn)4個(gè)狀態(tài)間的狀態(tài)轉(zhuǎn)移,每一次變倍使能有效時(shí),根 據(jù)當(dāng)前狀態(tài)轉(zhuǎn)移,變倍方向轉(zhuǎn)移到下一個(gè)相鄰狀態(tài),輸出該狀態(tài)時(shí)對(duì)應(yīng)的4個(gè)控制電平信號(hào),驅(qū)動(dòng)馬達(dá)轉(zhuǎn)動(dòng),實(shí)現(xiàn)變倍功能。需要注意的是,由于FPGA輸出脈沖 信號(hào)的驅(qū)動(dòng)電平和電流與步進(jìn)馬達(dá)的驅(qū)動(dòng)要求不匹配,應(yīng)在FPGA輸出引腳外接驅(qū)動(dòng)橋電路。










評(píng)論