姿態角測試研究

存儲測試系統包括:陀螺輸出,信號處理(通道切換、信號適配電路、A/D轉換器、數據存儲器),系統控制(中心控制器、電源控制)和接口電路4個部分。對三維角速度信號采用的是連續采樣的方法,需要進行通道切換。陀螺輸出的是電壓信號,可先進行通道切換再進行信號適配,這樣電路板的面積可以減小,進一步減小測試儀的體積。通過通道切換依次把傳感器信號送至信號適配電路,經調理后送至A/D轉換器,將模擬量轉換為數字量,存入存儲器。當觸發信號到來后,測試系統記錄完預設的容量,中心控制器給出模擬電源關斷信號,電源控制器停止記錄,測試系統進入省電模式。系統等待計算機發讀數指令由接口電路將數據讀出。設計了相應的接口電路,USB口和并口都可讀取測試裝置的數據。
2.3 系統抗沖擊處理
測試系統工作全程要承受沖擊過載,裝置必須要進行抗沖擊處理,保護測試裝置,使其能在高沖擊環境下正常工作。為了抗高沖擊過載,專門選取了抗高過載的器件。其中最重要的主控器件采用XCR3064,抗高過載能力達到3×105g[6]。針對測試系統專門設計了抗沖擊機械殼體,并且用環氧樹脂對測試裝置進行了真空灌封處理,將測試電路固結在電路保護殼中以抗高過載。經過上述抗高過載措施處理后,測試裝置能夠很好滿足測試需要,保證了測試系統的正常工作,系統可重復使用。
3 測試結果及實測數據分析
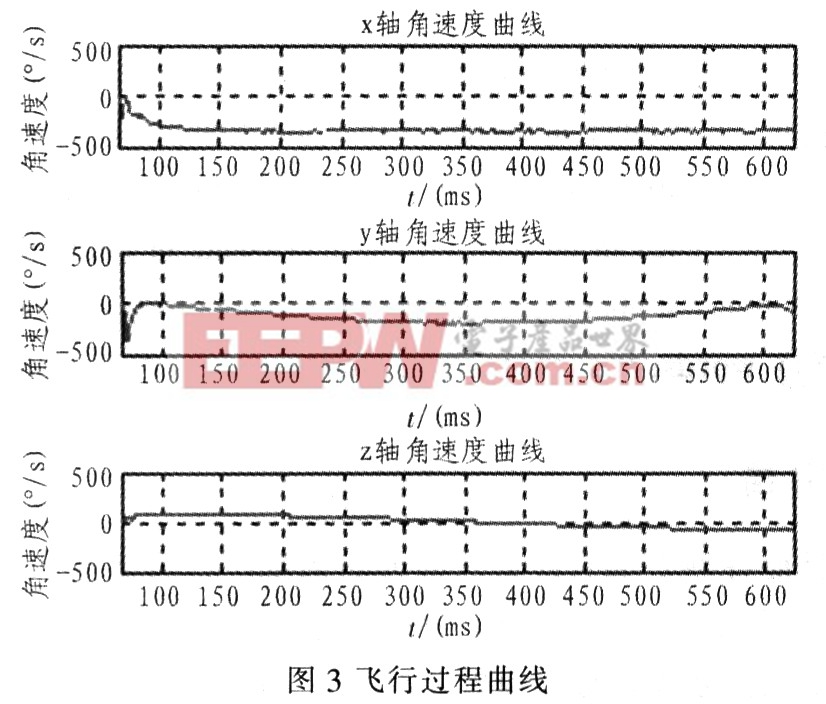
存儲測試系統已經成功應用于某小型飛行體的試驗,成功獲得了測試數據。下面是實測曲線及其分析,x軸為自轉軸,z軸為飛行方向。實測飛行過程角速度信號如圖3所示,圖3中,3個軸的角速度曲線在70 ms處均有一個小鼓包,為陀螺的加速度效應在曲線上的表現。
陀螺儀測得的ωx、ωy以及ωz已知,根據表達式7所示的運動學微分方程,在MATLAB下解算出角度,如圖4所示。經對比,與高速攝影記錄的姿態非常吻合。

4 結語
面向某飛行體姿態角測試的實際需要,研究姿態角測試技術,提出一種姿態角測試方案,分析理論基礎,作實際測試,實驗結果表明,該方案可滿足系統使用需求。








評論