一種移動(dòng)機(jī)器人遙操作接口系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)

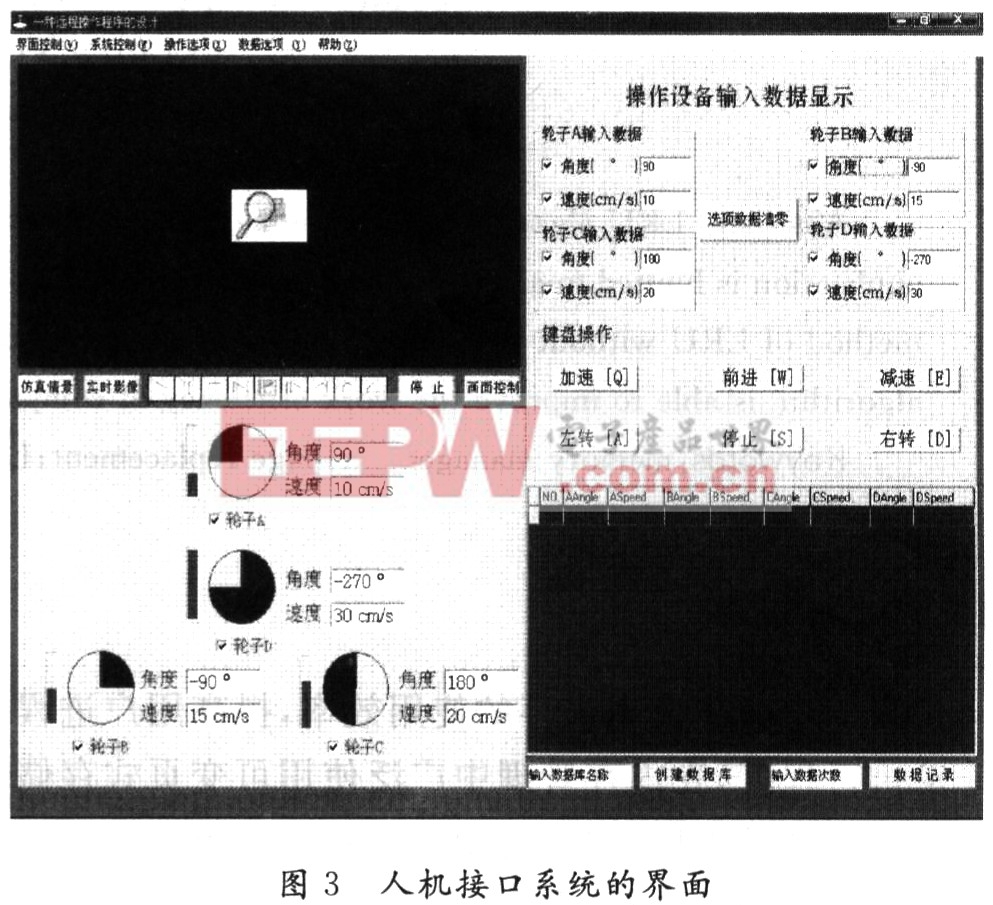
該遙操作平臺(tái)提供的人機(jī)接口系統(tǒng)界面如圖3所示。若檢測(cè)到方向盤(pán),并且在界面的控制菜單下選擇方向盤(pán)操作,則可以通過(guò)方向盤(pán)來(lái)操作機(jī)器人的移動(dòng)。如果在界面的控制菜單下選用鼠標(biāo)控制,可以點(diǎn)擊圖3“鍵盤(pán)操作面板”中的加速、前進(jìn)、減速、左轉(zhuǎn)等按鈕來(lái)操作機(jī)器人。如果在界面的控制菜單下選用選擇鍵盤(pán)控制,則可以通過(guò)鍵盤(pán)上的快捷鍵來(lái)操作機(jī)器人。圖4中4個(gè)圓盤(pán)形控件相應(yīng)地顯示4個(gè)主動(dòng)輪轉(zhuǎn)動(dòng)的角度,圓盤(pán)形控件左邊的柱狀控件相應(yīng)地顯示了4個(gè)主動(dòng)輪的速度,并將指令通過(guò)通信系統(tǒng)傳給機(jī)器人。左上角的區(qū)域還可以顯示機(jī)器人的仿真影像等。右上角的“操作設(shè)備輸入數(shù)據(jù)顯示”面板中可直接輸入機(jī)器人的速度和角度信息,可以使機(jī)器人快速準(zhǔn)確地進(jìn)入到預(yù)定的速度和角度上。
實(shí)現(xiàn)此人機(jī)接口系統(tǒng)的全部程序代碼由一個(gè)總結(jié)構(gòu)和4個(gè)類組成,下面簡(jiǎn)要地介紹一下它們的代碼和功能。
2.1 總結(jié)構(gòu)中的主要函數(shù)
(1)_fast call TMainForm::TMainForm(TCom-ponent*Ownetr):此函數(shù)主要完成機(jī)器人部分初始化和狀態(tài)選擇。
(2)void_ _fastcall TMainForm::Event(TObject*Sender):此函數(shù)主要響應(yīng)方向盤(pán)、鍵盤(pán)和鼠標(biāo)操作的事件,從而可實(shí)現(xiàn)對(duì)機(jī)器人移動(dòng)的操作。
(3)void_ _fastcall TMainForm::KeyCtrl(TOb-ject*Sender,charKey):此函數(shù)主要完成對(duì)鍵盤(pán)操作的初步響應(yīng)。
(4)void_ _fastcall TMainForm::Timer(TObject*Sender):此函數(shù)主要完成對(duì)機(jī)器人實(shí)時(shí)狀態(tài)和方向盤(pán)、鍵盤(pán)和鼠標(biāo)的操作的實(shí)時(shí)刷新,其刷新頻率可以在一定的范圍內(nèi)進(jìn)行選擇。
2.2 四個(gè)類及其功能
(1)class CComPort。此類主要完成對(duì)數(shù)據(jù)存儲(chǔ)緩沖區(qū)的初始化、釋放和對(duì)緩沖區(qū)的讀和寫(xiě)等。
(2)class CJoyStick。此類主要完成對(duì)方向盤(pán)數(shù)據(jù)的讀取,USB端口設(shè)備連接狀態(tài),方向盤(pán)初始化,設(shè)置數(shù)據(jù)格式,清除數(shù)據(jù),釋放空間等操作。
(3)class CKamado。此類主要完成在鍵盤(pán)或鼠標(biāo)操作模式下,機(jī)器人自主完成一系列基本動(dòng)作(前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)、停止、加速、減速等)和幾個(gè)自定義動(dòng)作(轉(zhuǎn)直角、原地自旋等)。
(4)class CWheel。此類主要實(shí)現(xiàn)自主模式下輪子的旋轉(zhuǎn)動(dòng)作,包括每個(gè)輪的旋轉(zhuǎn)的具體速度和度數(shù)。
3 室內(nèi)行走實(shí)試驗(yàn)
基于上述遙操作接口系統(tǒng),進(jìn)行了多次機(jī)器人室內(nèi)行走試驗(yàn)。人機(jī)接口系統(tǒng)能夠?qū)崿F(xiàn)以下功能:用3種操作模式操作機(jī)器人的移動(dòng),對(duì)機(jī)器人的速度角度進(jìn)行預(yù)置,對(duì)機(jī)器人進(jìn)行狀態(tài)顯示和數(shù)據(jù)存儲(chǔ)。機(jī)器人可以根據(jù)遙操作接口發(fā)送的指令,安全穩(wěn)定、可靠地實(shí)現(xiàn)前進(jìn)、后退、速度角度預(yù)置、原地旋轉(zhuǎn)、爬坡等運(yùn)動(dòng)。
4 結(jié) 語(yǔ)
在此設(shè)計(jì)與實(shí)現(xiàn)了一種機(jī)器人的遙操作接口系統(tǒng),操作員可以通過(guò)此接口系統(tǒng)成功地操作機(jī)器人。實(shí)驗(yàn)結(jié)果證明,此遙操作接口系統(tǒng)具有以下優(yōu)點(diǎn):操作簡(jiǎn)便,界面友好,安全性和可靠性強(qiáng)等。但是仍存在不足,如操作的實(shí)時(shí)性較差,還有待改進(jìn)。









評(píng)論