一種移動機器人遙操作接口系統的設計與實現

摘 要:針對移動機器人的遠程操作問題,基于C++Builder軟件環境,設計和實現了一種移動機器人的遙操作接口系統,可利用方向盤、鍵盤和鼠標來操作機器人的移動。基于此接口系統建立了遙操作系統原型,并且進行了室內試驗。室內試驗表明,此遙操作接口系統具有簡便、界面友好等特點。
關鍵詞:遙操作;人機接口;移動機器人;軟件環境
0 引 言
遙操作就是遠距離操作,是在遠方人的行為動作遠距離作用下,使事物產生運動變化。遙操作是一種基礎技術,應用領域相當廣泛,如機器人領域、航空航天領域、基礎科學試驗、核工程、海底與遠洋作業等。遙操作技術使移動機器人到達艱險的環境,通過機器人完成特定的任務,從而可以使人遠離艱險的工作環境。因此,研究遙操作技術意義深遠。
機器人在物理空間上,可以實現人類感知能力和行為能力的延伸;在信息層次上將遠端的移動機器人與操作人員無形連接在一個閉環回路里,實時地控制遠端移動機器人的運動,以最大限度地利用遠近端設備、資源和遙操作者的智力、經驗,從而實現資源的最佳配置,完成特定的任務。人機接口系統就是通過什么樣的方式來發送控制指令和進行狀態數據的反饋,是移動機器人中一項重要的技術。
基于遙操作平臺,設計了一種針對“喀嗎哆”機器人的人機接口系統。采用該人機接口系統進行了機器人室內行走實驗。實驗表明,該人機接口系統方便靈活、可靠、人機接口系統顯示豐富生動,提供多種操作模式,可實現數據的存儲和實時顯示。
1 機器人人機接口系統
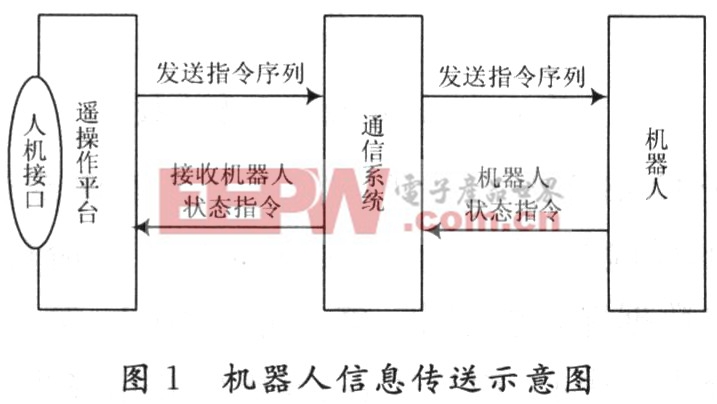
一種柔性結構的四輪式移動機器人,其信息傳送示意圖如圖1所示。
基于遙操作平臺和通信系統,遠方操作員通過人機接口將指令序列發送到機器人,機器人接收并編譯指令,并且把編譯之后的指令發送到相應的執行機構,再由執行裝置來控制機器人的移動。同時機器人通過通信系統將其各種狀態和相關信息傳到遙操作平臺中,遠方操作員可以通過人機接口看到與機器人相關的信息。該設計實現的是與遙操作平臺相嵌的人機接口系統部分,即圖1中橢圓表示的部分。
2 設計與實現
該系統用到相關硬件設備如下:計算機(P4 1.8 G、512 MB內存、USB端口、Windows XP操作系統、Di-reetX 9.0版本)1臺、標準鍵盤1個、鼠標1個、SG-USB006E型賽諾方向盤一個。軟件有Borland C++Builder編譯環境。
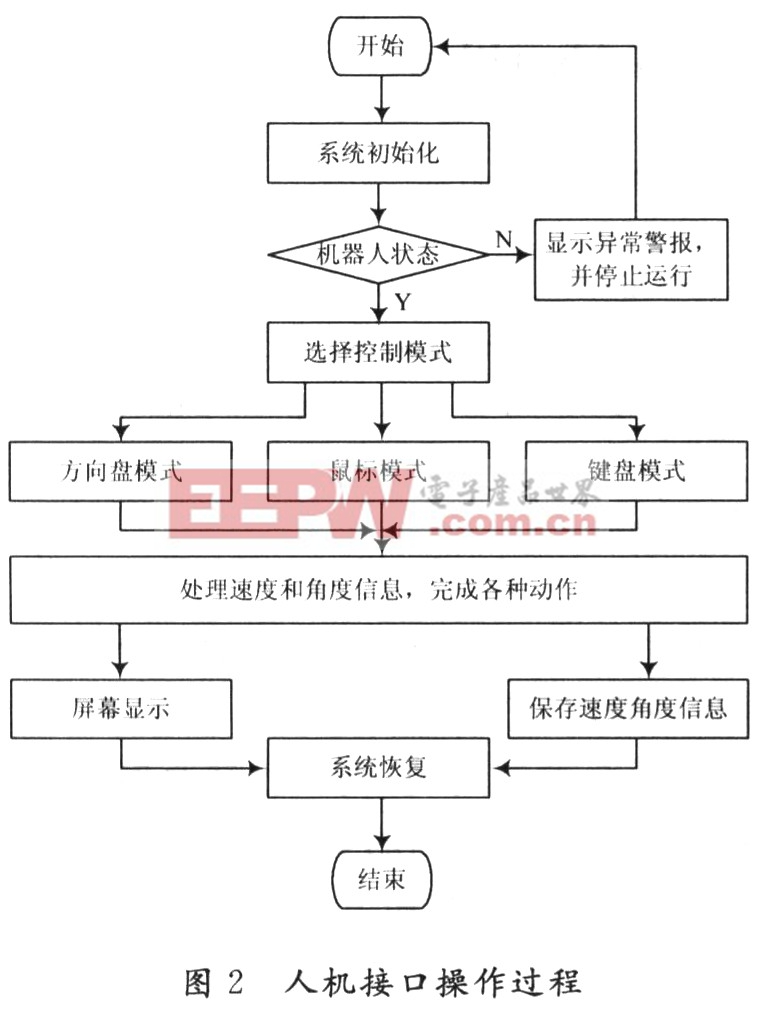
人機接口系統操作過程見圖2。首先,開始之后系統初始化,檢測是否連接了方向盤。若檢測到方向盤,下面可有方向盤、鍵盤和鼠標模式可供選擇;若沒有檢測到方向盤,只可選擇鍵盤和鼠標模式。接著,判斷機器人狀態是否正常。若異常,則顯示異常警報,返回到開始;若正常,根據是否檢測到方向盤,則可在可選的操作模式中選擇一種或幾種操作模式。接著,可以通過已選模式操作機器人,同時接口系統將相應速度和角度等數據寫入緩沖區,根據緩沖區的數據,機器人最終可以完成各種相應的動作。同時接口系統還可以實現機器人相應信息的屏幕顯示和速度角度等信息的保存等。









評論