智能PID設計與其在鍋爐主汽溫控制的應用

對于某超臨界600WM機組的鍋爐過熱器在4個特定工況下汽溫對噴水擾動的動態特性如表1所示: 
2 仿真結果
對主汽溫在典型工況下的動態特性進行了仿真。在仿真試驗中,內回路采用P調節器,衰減率取為ψ=0.75,使內回路具有較強的克服擾動的能力。對于外回路,為了減少主汽溫的波動,取衰減率為ψ=0.90。因為δ0.9=1.6δ0.75,Ti0.9≈0.8Ti0.75。仿真結果如圖2所示。從圖中可以看出:采用帶指導信號的PID調節器,能夠在機組負荷變化時,修正調節器參數,使調節系統品質指標基本保持不變。 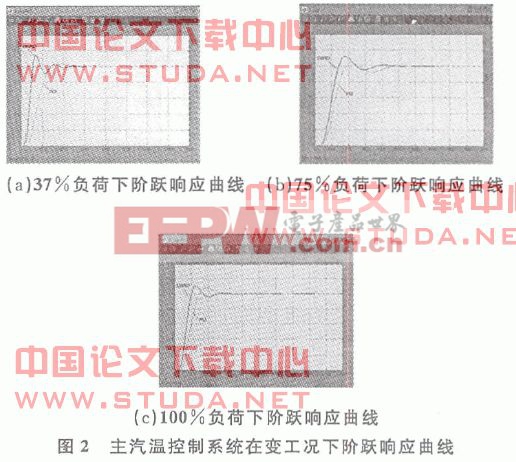
4 小結
設計具有對象模型變化適應能力的調節器所需要的信息要比設計針對固定模型的調節器所需要的信息要多。根據誤差信號及其導數信號無法識別熱工對象模型變化,需要引入指導信號,利用指導信號來識別調節對象模型的變化。導出了帶指導信號的PID調節器參數計算公式,并通過舉例進行了驗證。
對于大慣性、高階次、變模型參數熱工對象,可以通過實驗測定若干典型工況下熱工對象的階躍響應曲線,擬合模型參數隨工況的變化的函數關系,然后可根據文中所述方法設計出變參數PID調節器,使變工況下調節系統的品質指標近似不變。
在常規熱工對象模型參數中引入指導信號,利用常規PID調節器整定理論可以處理變模型熱工對象的控制問題,提出了通過線性控制理論擴展來處理非線性控制理論的新方法。這方法有嚴格的理論基礎,簡捷實用。

pid控制器相關文章:pid控制器原理






評論