基于改進BP神經網絡的電加熱爐爐溫PID控制研究

摘 要:以電加熱爐為控制對象,提出一種基于BP神經網絡的PID控制策略。針對BP網絡學習速度的緩慢性及較差的泛化能力,受Fletcher-Reeves線性搜索方法的指引,對傳統(tǒng)BP神經網絡進行改進,改善算法在訓練過程中的收斂特性。最后仿真結果證明了該控制策略的有效性。
關鍵詞:電加熱爐;BP神經網絡;PID控制
1 基于BP神經網絡的PID控制
BP算法是在導師指導下,適合于多層神經元網絡的一種學習,它是建立在梯度下降法的基礎上的。理論證明,含有一個隱含層的BP網絡可以實現以任意精度近似任何連續(xù)非線性函數。
BP神經網絡結構如圖1所示,由三層(輸人層、隱含層、輸出層)網絡組成,使輸出層的神經元狀態(tài)對應PID控制器的三個可調參數Kp、Ki、Kd。通過神經網絡的自學習、加權系數調整使神經網絡輸出對應于某種最優(yōu)控制律下的PID控制器參數。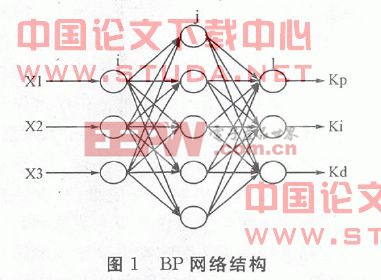
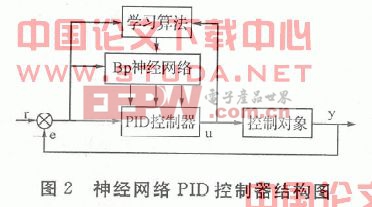
基于BP(Baekpropgation)網絡的PID控制系統(tǒng)結構如圖2所示,控制器由常規(guī)的PID控制器和神經網絡兩部分組成,常規(guī)PID控制器直接對被控對象進行閉環(huán)控制,并且其控制參數為Kp、Ki、Kd在線調整方式;神經網絡根據系統(tǒng)的運行狀態(tài),調節(jié)PID控制器的參數,以期達到某種性能指標的最優(yōu)化,使輸出層神經元的輸出對應于PID控制器的三個可調參數Kp、Ki、Kd。通過神經網絡的自學習、加權系數的調整,使神經網絡輸出對應于某種最優(yōu)控制規(guī)律下的PID控制器參數。
2 改進型BP神經網絡
基本BP神經網絡主要存在以下兩個缺陷:其一,傳統(tǒng)BP網絡是一個非線形優(yōu)化問題,不可避免的存在局部極小問題。網絡的權值和閥值沿局部改善的方向不斷修正,力圖達到使誤差函數 最小化的全局解,但實際上常得到的是局部最優(yōu)點;其二,學習過程中,誤差函數下降慢,學習速度緩,易出現一個長時間的誤差坦區(qū),即出現平臺。
目前已有不少人對此提出改進的方法。如在修改權值中加入“動量項”,采用Catchy誤差估計器代替?zhèn)鹘y(tǒng)的LMS誤差估計器等。本文在此探討通過變
換梯度來加快網絡訓練的收斂速度的共軛梯度算法,利用這種算法改善收斂速度與收斂性能。改進共軛梯度算法在不增加算法復雜性的前提下可以提高收斂速度,并且可以沿共軛方向達到全局最優(yōu)即全局極值點。它要求在算法進行過程中采用線性搜索,本文采用Fletcher-Reeves線性搜索方法,以保證算法的收斂速度。
將改進共軛梯度法應用于BP網絡的控制算法如下: 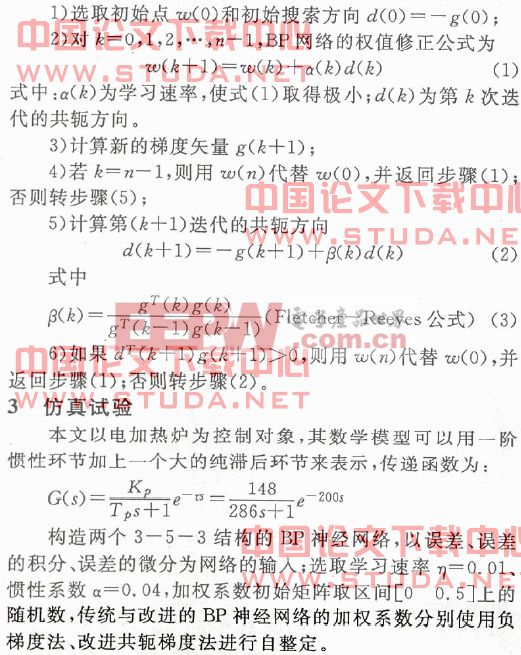








評論