基于光電傳感器的智能尋跡車設計與實現

3 軟件設計
3.1 主程序設計
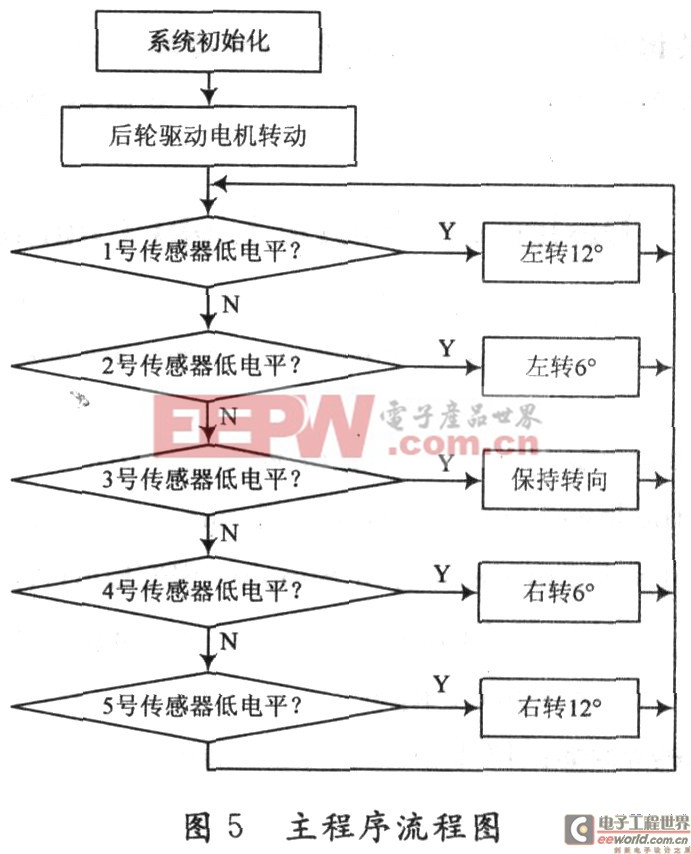
采用C語言在ICC―AVR開發環境下進行編程調試。主程序流程圖如圖5所示。
3.2 分級模塊程序設計
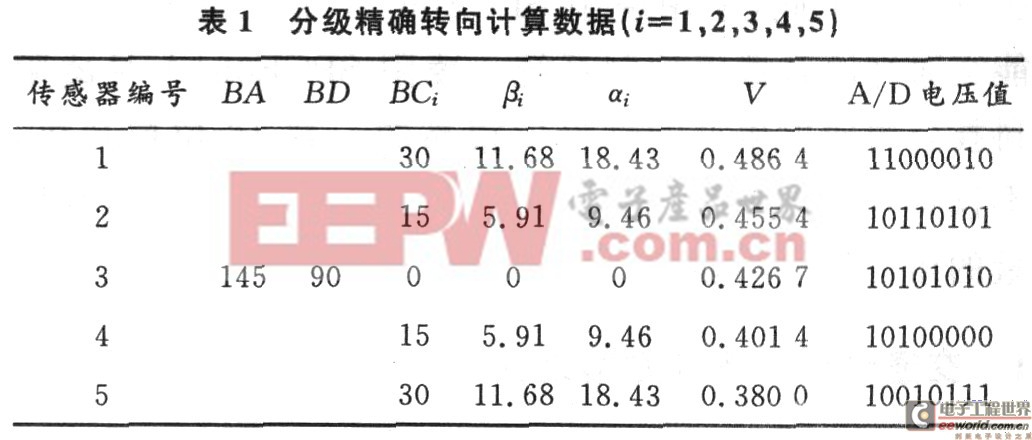
ATMEGAl6能對來自端口A的8路單端輸入電壓進行采樣。當片中ADC多功能寄存器ADMUX的REFSl和 REFS0設置為1時,VAREF=2.56 V,為片內穩定基準電壓源,即圖3中電壓V。智能尋跡車轉向極限為±30°,表1為5個光電傳感器分級精確轉向相應計算數據。
4 結 語
基于視覺的智能尋跡車模設計方案能夠在線型復雜,轉彎半徑不確定性大的情況下,利用視覺自主尋跡前進,分級精確轉向。對于環境光線的影響,可考慮增加濾波電路、優化控制算法增加其抗干擾能力。實驗證明,該方案有良好的尋跡效果。












評論