旋轉導向鉆井穩定平臺前饋模糊算法研究

4.1 系統性能仿真分析
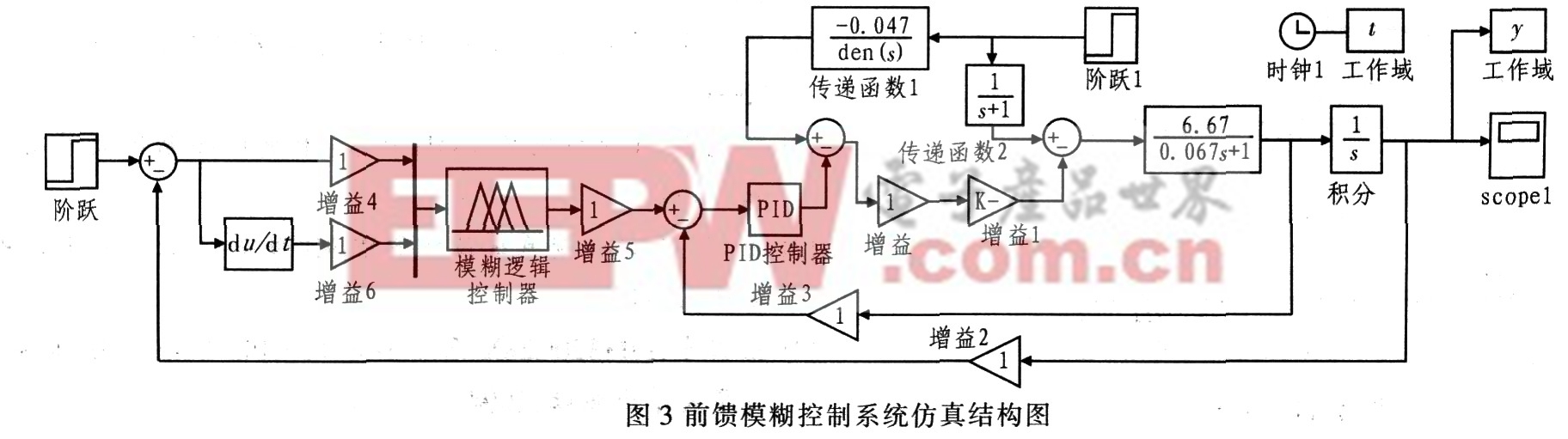
在MATLAB軟件中,用FUZZY工具箱按照模糊控制器的控制規則構造模糊控制器,在Simulink中組建如圖3所示的穩定平臺前饋模糊控制系統的Simulink仿真模型。
為了突出所采用的前饋模糊控制算法的優越性,還對比了采用前饋PID控制算法,通過仿真比較它們的控制性能。其仿真結果如圖4所示。
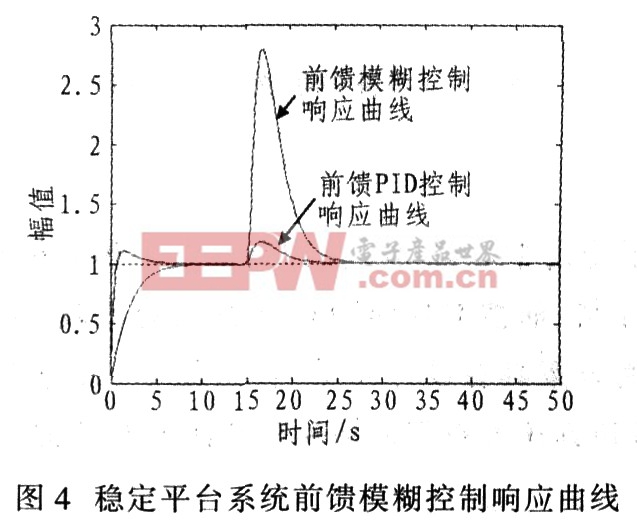
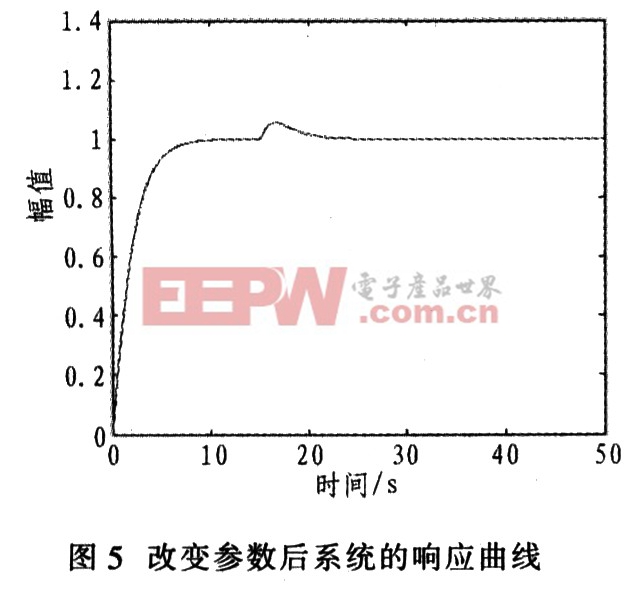
由圖4明顯發現:前饋模糊控制方式控制性能較好,前饋PID控制的響應速度雖快,但是其抗擾動能力相對較差.在相同擾動的情況下,其超調量過大,系統出現明顯的波動。而前饋模糊控制,在無擾動信號時,系統未出現明顯超調,而系統運行穩定后加相同擾動,系統也未出現明顯波動,并能夠很快進入穩定運行狀態,抗干擾能力明顯加強。由此可見,前饋模糊控制具有響應速度快,抗干擾能力強的特點,因此采用前饋模糊控制穩定平臺系統可有效提高系統動態響應。穩定平臺串級模糊控制系統的實際使用中,改變系統模型參數后系統響應曲線基本重合,如圖5所示。說明前饋模糊控制的導向鉆井穩定平臺有很好的自適應性和魯棒性。
4.2 前饋模糊控制抗擾動性仿真
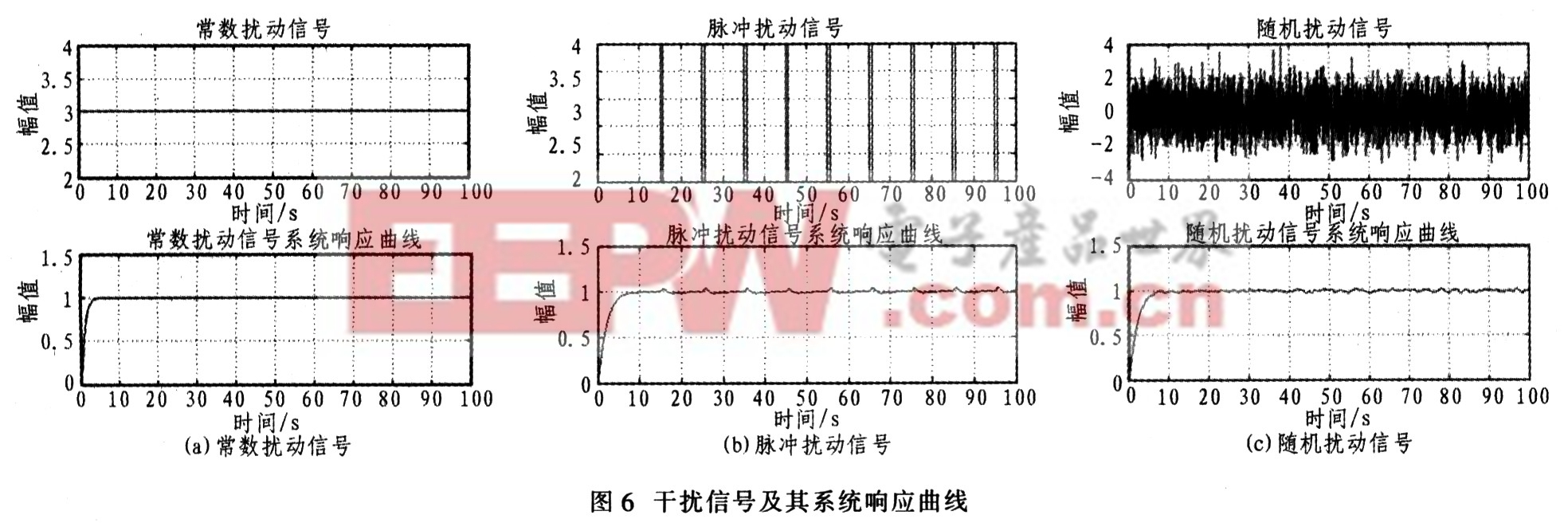
鉆井時井下情況復雜,除了工具自身產生的模型參數變化外,其他各種各樣的擾動隨時都有可能產生,如鉆機憋鉆、卡鉆、巖層性質導致鉆頭受力不均,鉆井液壓力、排量波動等。為了測試前饋模糊控制的抗擾動性,分別以常數信號、脈沖信號、產生正態分布的隨機信號代表各種擾動,對系統進行抗干擾能力的仿真研究。仿真結果如圖6所示。仿真表明,采用前饋模糊控制穩定平臺系統能達到很好的控制要求,針對多種干擾,系統的波動很小,能夠很快進入穩定運行狀態,控制效果良好。
5 結語
建立了穩定平臺前饋模糊控制系統的仿真模型,通過對前饋模糊控制、前饋PID兩種控制方式的比較,實驗得出前饋模糊控制方案具有設計簡單、算法簡單、系統魯棒性強等特點。通過仿真還可看到前饋模糊控制能有效抑制各種不確定性的干擾因素。這種控制器結構簡單,易于實現,而且結果精度較高。從而驗證了前饋模糊控制算法在導向鉆井穩定平臺控制系統中的可行性。


評論