復雜路線下機器人的三點三輪尋跡系統

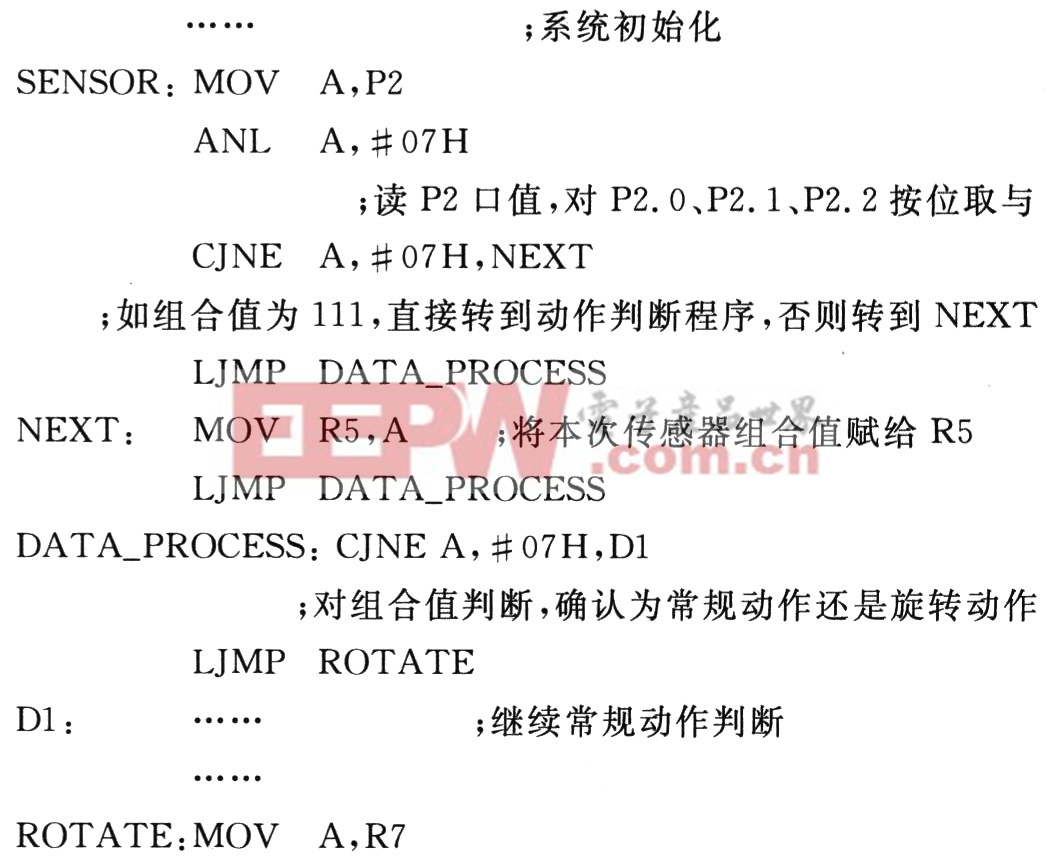
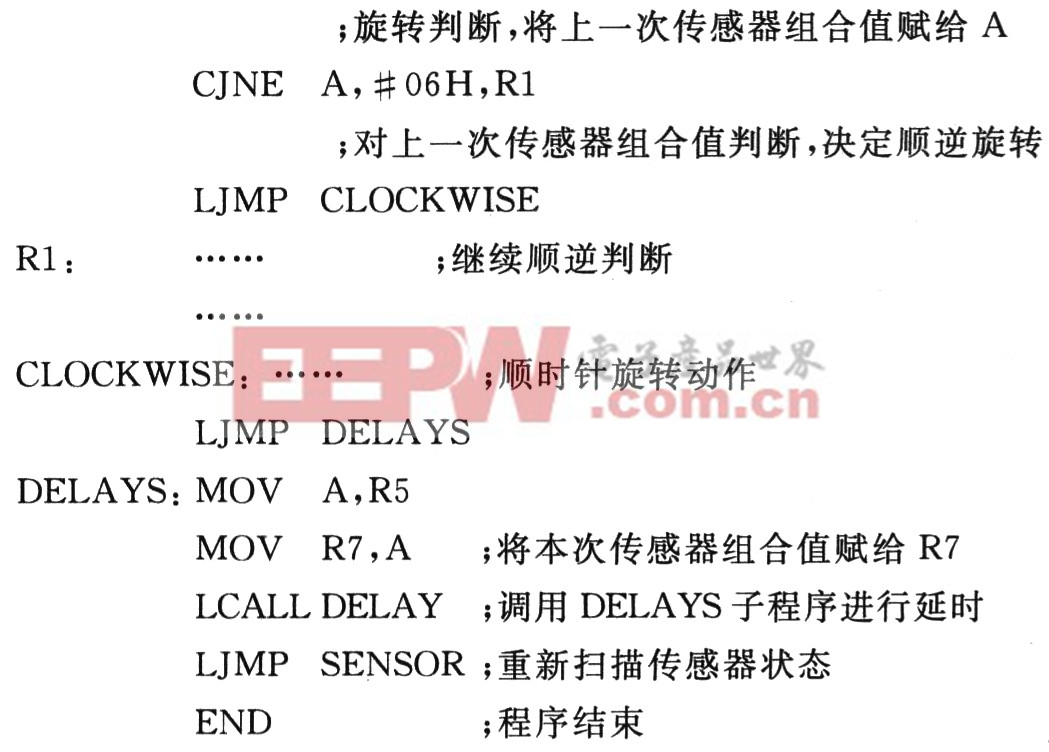
為了進一步提高系統的安全性和可靠性,還需增加異常處理算法。可能出現的異常情況有:過小彎道或小角度折道時,機器人還來不及轉過彎來,就已經完全偏離黑線。這種情況下,3個傳感器都輸出“1”,檢測不到黑線,若不及時處理,機器人將無法繼續尋跡。針對該情況,設計了原地旋轉動作來找回預定路線,不過原地旋轉有順、逆時針之分,因此還得區分開來。改進后編程的思路為:每次讀取P2口值之前,將其上一次的傳感器組合值存入某個寄存器,當出現組合值為 “111”的情況時,立即查詢上一次的值,根據該值,可以判斷出機器人是從哪一側偏離黑線的,從而進行順或逆時針原地旋轉。其主要程序如下:本文引用地址:http://www.104case.com/article/163567.htm
結語
根據上述設計思路,我們制作出尋跡機器人并進行了測試。測試場地如圖4所示,黑色導引線寬度為3 cm,黑線周圍區域均為白紙覆蓋。測試結果表明:該尋跡機器人能在此復雜路線下平穩、順利地沿著黑線走完全程,并在終點沿原路返回,達到了預期的目標。這為進一步研究復雜環境下的自動行走機器人提供了參考。

本文的創新點為:使用3個自制的紅外光電傳感器,以簡單的設計和較少的硬件實現了復雜路線下機器人的尋跡。而基于該機器人雙級轉彎的設計思想,可以增加傳感器數量、組成傳感器陣列來實現多級轉彎,從而對機器人的自主尋跡有著更為精確的控制。









評論