復雜路線下機器人的三點三輪尋跡系統

1.3 驅動模塊
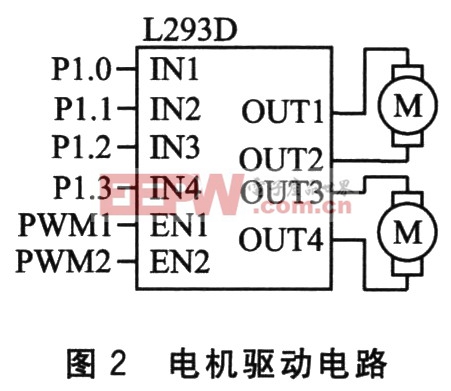
驅動機器人行走的2個電機需要不同的轉速來實現轉彎。選用的驅動芯片為L293D,它包含4個輸出通道,最大輸出峰值電流為1.2 A,能同時驅動2個直流電機工作;其信號輸入端和使能端接收到來自單片機的信號,控制電機的通斷以及正、反轉,還可以通過向使能端輸入不同占空比的方波信號來調整電機轉速(PWM方式)。如圖2所示,IN端口接控制信號,OUT端口接電機的兩端,EN端口接使能信號。一組IN端口輸入為高/低或低/高電平時,能實現電機的正/反轉。一組IN端口輸入均為高或低電平時,電機將停轉。EN使能端為高電平時,相應端口輸入信號有效;反之,則輸入信號無效。在EN 端輸入PWM波,通過調整PWM波的占空比,即可實現電機的無級調速。本文引用地址:http://www.104case.com/article/163567.htm
2 尋跡控制
機器人尋跡控制示意圖如圖3所示,機器人采用前輪驅動后輪輔助的三輪差動式行走方式。車體前部兩輪均為主動輪,由兩個電機分別驅動,利用它們的轉速差來控制機器人運動方向;后輪為從動萬向輪,僅起著支撐車體的作用。車底板前部以車體中心線為軸線對稱放置著3個自制的紅外光電傳感器,作為機器人的尋跡傳感器。
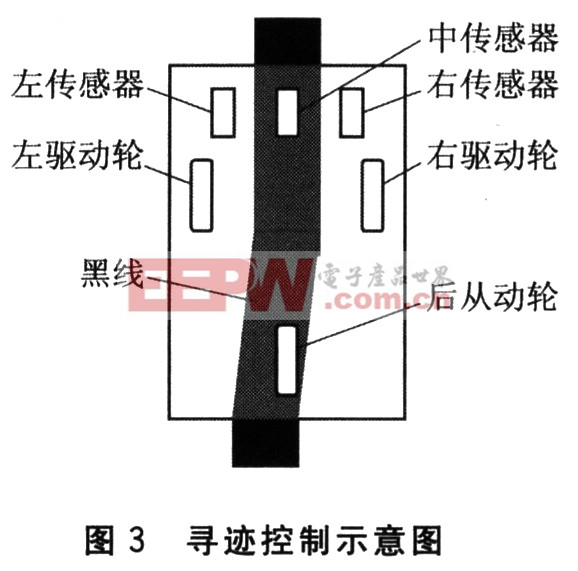
機器人尋跡場地中除了黑線,其他區域均為白色。當傳感器正下方為黑線時,輸出“0”狀態,當其為白色區域時,輸出“1”狀態。因此,理論上3個傳感器輸出的組合狀態會有8種,如表1所列。每一種組合狀態都對應著一種機器人下一步的行走動作,共有前進、左轉、快速左轉、右轉、快速右轉、原地旋轉、停止7種動作。
注:“+”指車輪向前運動,“-”表示車輪向后運動,“1.0”、“0.3”指的是控制相應電機轉速的PWM波的占空比,可根據實際需要在程序中修改。
本機器人有著雙級轉彎的設計,即普通轉彎和快速轉彎。當機器人對黑線的偏離量比較小時,使用普通轉彎,即兩個驅動輪都向前運動,速度一大一小,依靠兩輪的速度差來實現轉彎;而當機器人偏離黑線較遠時,使用快速轉彎,即兩個驅動輪一個向前運動,一個向后運動,這樣能迅速實現轉彎。普通轉彎用于大半徑彎道、大角度折道,而快速轉彎則用于小半徑彎道和直角銳角折道等非平滑過渡路線。對于非封閉路線,還設計了原地旋轉的動作,來實現原路返回:一旦機器人小車走完全程,3個傳感器將均檢測到白色區域,輸出組合狀態“111”,此時一輪全速前進,一輪全速后退,小車原地旋轉,直到掉過頭來傳感器檢測到黑線為止。

3 程序設計
程序設計時,采用匯編語言編程。其思路為:第1步,系統初始化后,讀取單片機P2口的值,然后對其P2.0、P2.1、P2.2按位取與,得到傳感器模塊的組合值。第2步,將得到的組合值與預定的值比較,若相等則執行相應的動作,否則繼續比較,直到獲得正確的動作。比較完全部動作后,轉到第1步重新掃描傳感器的狀態值。









評論