基于Sunplus SPCE061A控制核心的電動車蹺蹺板設計及實現

在多次全國電子設計大賽中,電動車的設計一直都是熱點,從歷屆的電動車設計作品來看,電動車的車體往往做得大而重,且常常需要依靠車體以外的模塊輔助才能完成,這對于車來說就不夠智能化了。本文中電動車設計所采用的方案,車體小巧靈活,不需借助任何的附加設備即可工作,而且對蹺蹺板的要求很低。
1 總方案設計
系統可以劃分為控制部分和信號檢測部分。其中,控制部分由控制器模塊、電源模塊、電機模塊、顯示模塊、語音模塊等模塊構成;信號檢測部分由平衡檢測模塊、引導模塊構成。采用單控制器,控制器和角度傳感器直接安裝在車體上,角度傳感器的角度信號傳送給控制器,控制器根據信號來判斷電動車當前的狀態,做出相應的反應(前進、后退、停車、平衡指示等)。采用單控制器使小車能夠更加靈活的行駛,避免了長信號線或者無線通信帶來的信號采集不準確問題。經過多次試驗,證明車體能夠輕松找到平衡點。系統方框圖如圖1所示。
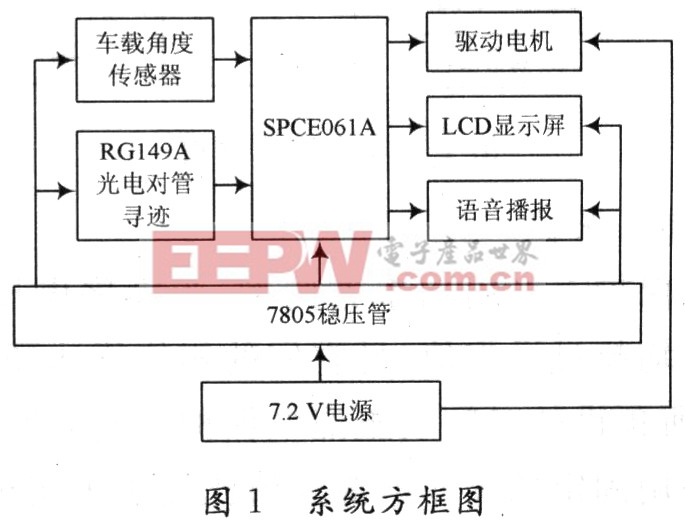
該設計電動車蹺蹺板實物圖如圖2所示,從中可以看到,現在電動小車的狀態為平衡點附近,這是因為蹺蹺板的平衡是一種絕對的動態平衡,即平衡時,小車在板上平衡點做振動運動,因為這樣的運動幅度非常小,可以認為是一種偽靜態。

2 各模塊具體實現方案及硬件電路
2.1 車體設計及電機控制模塊
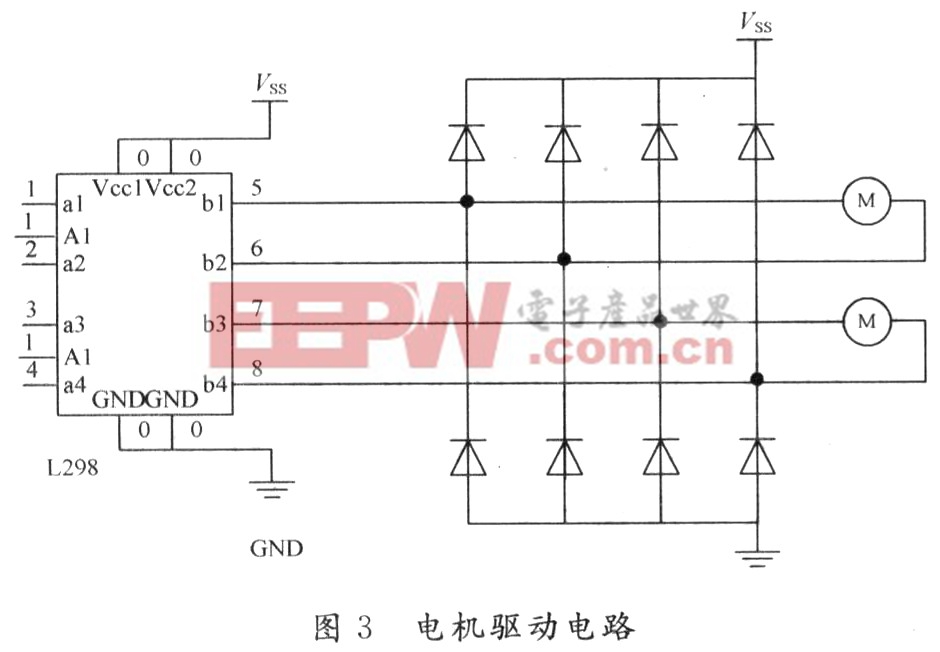
該設計采用的車體由鋁合金車架及兩個直流電機組成,具有堅固穩定的特點,并且直流電機帶有驅動電路及減速箱,減速箱的減速比為64:1。設計中使用L298搭建了驅動電路,經過調試車速可以分級控制。硬件電路圖如圖3所示。
2.2 控制器模塊
該設計采用凌陽公司的SPCE061A單片機,SPCE061A是16位結構的微控制器。該單片機具有驅動能力高和集成度高,易擴展,可靠性高,功耗低,結構簡單,中斷處理能力強等特點。SPCE061A的CPU時鐘為0.32~49.152 MHz,內置32 KB FLASH和2 KWords的SRAM,速度可以滿足電機控制對實時性的要求;SPCE061A還可以通過在線調試器:Probe和EZ Probe實現在線程序下載和調試,極大地提高開發效率;另外SPCE061A尤其適用于語音處理和識別等領域,可方便地用來實現聲音錄制、播放,只要調用庫函數即可實現音頻編程,可以實現語音播放功能,比別的單片機更有特色。因此選擇此方案。












評論