具有高精度的懸浮軸振動測量傳感器的設計

由此,只要獲得合理的計數時間△T,就可以得到2個頻率信號的計數差值,設計時,△T是利用單片機計數光電編碼器的輸出脈沖確定的。由于光電編碼器采樣的時間間隔約為111μs,一個采樣周期內除了計數外,必須留有計數值的記錄和運算時間,所以,選取ΔT=100μs111μs,由式(10)可知計數器的讀數差值與頻率的關系為
![]()
差頻計數器的啟停信號是由單片機控制的。當單片機啟動控制信號GEP為高電平后,差頻計數器開始等待計數。差頻計數器的被測頻率信號是由2個與門控制輸入的。在每個采樣周期到來時即單片機接收光電編碼器脈沖e1為上升沿后,單片機分別檢測2個振蕩器的輸出頻率信號osc11,osc21,等待osc11,osc21信號的第一個上升沿,分別發出控制信號f1,f2啟動與門,使差頻計數器接收對應的頻率信號并進行計數,同時,單片機對應的內部計數器開始定時,定時時間為△T。定時時間到△T后,單片機關閉差頻計數器的對應輸入信號的閘門,讀取差頻計數器的計數值,并對計數器進行清零處理,當2個計數器均完成計數后,單片機開始對D1,D2進行數字處理。差頻計數器被測頻率信號與定時控制信號之間采用了同步鎖定的方法,并分別對2個頻率信號計數,這樣就消除±1的計數誤差。振蕩器輸出為高頻信號,因此,一個采樣周期內2個頻率信號第一個上升沿到來的時間間隔不會大,即每個采樣周期內都能完成對2個頻率信號的ΔT間隔計數,周而復始就實現了整個差頻計數的功能。差頻計數器的工作時序如圖4。圖中,1為單片機的啟停控制信號CEP,2為編碼器的輸出信號e1,3為測量傳感器的頻率信號osc11,4為與門1的控制信號f1,5為被計數器1計數的頻率信號osc12,6為溫度補償傳感器的頻率信號osc21,7為與門2的控制信號f2,8為被計數器2計數的頻率信號osc22。

2.2.3數據的處理
由于懸浮軸振動位移與單片機輸出計數值成單值函數關系,最后,利用C8051F020單片機編寫軟件程序把計數差值轉換成振動的位移量實現振動位移的存儲和分析。其中,振動位移分別用2個字節進行存儲,振動位移的正負根據減法器的進位位確定,它存儲在一個獨立的單元中,設定00H表示振動為正,01H表示振動位移為負。
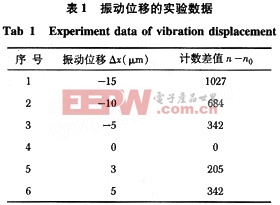
綜合式(2)、式(3)、式(6)、式(11)可以推導計算出振動位移與計數器的差值之間的關系如表1。
3結束語
懸浮軸振動測量傳感器能夠測量振動頻率小于4.5 kHz,振動范圍在-25~25 μm內的振動位移量,實現了轉動時對其振動位移的測量,同時,避免了對本身運動規律的干擾,而且,硬件采用差頻測量、光電編碼器控制等角度采樣,結合軟件的數據處理,在很大程度上提高了測量精度,消除了傳感器調理電路電源波動、環境溫度變化、分布電容的影響,還能屏蔽電磁干擾,保證了測量結果的可靠性,可應用在特殊的測控環境中。









評論