PLC的工業(yè)機器人關節(jié)直流伺服系統(tǒng)

3 系統(tǒng)程序設計
程序設計方案為手動輸入一個角度值,讓電機轉(zhuǎn)動,通過與電動機相聯(lián)的光電碼盤來檢測電動機轉(zhuǎn)的角度,將轉(zhuǎn)動角度變成脈沖信號。由于電動機的轉(zhuǎn)速非常快,所以只能把脈沖信號送往PLC的高速計數(shù)器。然后將計數(shù)器的脈沖記錄與手輸入的進行比較,如果兩者相等說明電動機已經(jīng)到達指定角度位置,否則繼續(xù)進行修正。值得注意的是,由于電動機從轉(zhuǎn)動突變到停止會有一定的慣性, 因此在進行信號比較時應允許有一定的誤差,不然電動機就會始終處在修正位置狀態(tài)。系統(tǒng)程序框圖如圖3所示。
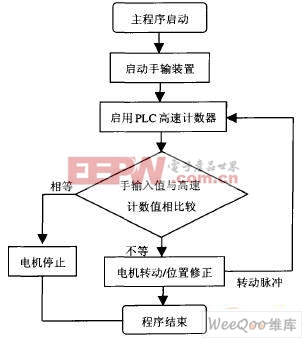
圖3 系統(tǒng)程序框圖
4 結(jié) 論
基于PLC研制的直流伺服系統(tǒng),利用PLC擴展能力強的特點,添裝手動輸放裝置,實現(xiàn)工業(yè)機器人關節(jié)直流伺服系統(tǒng)的可視操作。其優(yōu)點是:(1)無需改變電路結(jié)構(gòu),即可通過程序?qū)崿F(xiàn)電機正反轉(zhuǎn)的控制;(2)能夠使電機不等待停止轉(zhuǎn)動即可立刻反方向轉(zhuǎn)動;(3)可令電機急停,避免電機慣性轉(zhuǎn)動;(4)編程、維護方便。

伺服電機相關文章:伺服電機工作原理










評論