PLC的漿液下移動機器人控制系統

圖2中f軸表示:頻率;t軸表示:發射脈沖數。小車剛開始啟動階段以f1的頻率啟動,加速到f2,發射的脈沖數是t1-t0。,然后以f2的頻率勻速,規定每4 s對小車進行一次定位和控制,假設在t2時正好是4 s,開始對小車進行控制,但是,定位和控制過程需要一段時間,當發射控制命令時,小車可能已不在原來定位的點。此時時間已超過4 s,設此時滯的時間為t,計算所要執行的程序量,t的最大上限值是0.1 s,這么小的時間完全可以忽略,在時滯的時間內讓小車仍以原來發射脈沖頻率運行,當發射的脈沖數是t3時開始對小車進行了新的控制,小車進行下一步的運行。然而,此刻仍以前一步的頻率為開始發射頻率。
轉換辦法是通過兩條命令:①MOVB 0,SMB67;②PLS 0。使前一步的運行立刻停止,接著調用新的包羅段控制小車進行下一步的運行,下一步的開始周期是前一步的結束周期,加速或減速到本步規定的周期(如圖2所示),加速或減速的時間盡可能短,以此周期勻速運行。小車在運行的整個過程中每步之間處理方法都是這樣。圖中所示為頻率減小到f5小車停止。采用此方法后小車的運行是連續平穩的。
4 軟件設計
控制系統程序流程框圖如圖3所示,整個程序共有4大塊組成:①對S7-200各個變量、中斷初始化;②主站同各從站進行信息通訊;③進行定位處理;④控制電機。
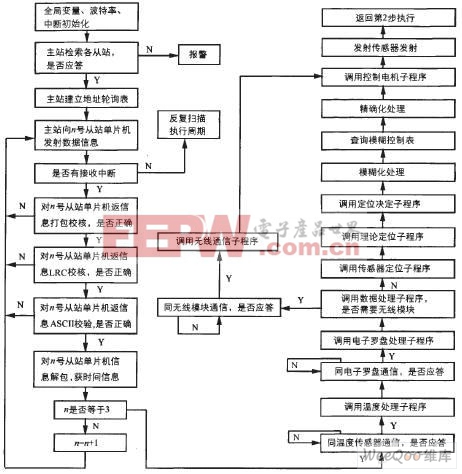
圖3 程序流程框圖
整個程序量是巨大的,合理安排程序結構顯得很重要。當沒進行通信時,S7-200反復掃描執行周期,出現字符中斷時,對接收到的信息進行保存處理,因為S7-200順序執行的特點,這要在很多執行周期內完成。但是每個執行周期的時間都是短暫的。所有的從站都通信完畢,調用定位子程序求出小車所在的空間位置。然后順序調用模糊控制子程序、電機控制子程序。這三大塊子程序要在同一周期內完成,此周期執行時間是最大的,程序必須簡單實用,使執行周期盡可能的降到最小值,減小控制的時滯。從宏觀上看掃描周期顯現出伸縮性的特點。
5 結束語
針對漿液下移動機器人的功能要求及PLC所具有的特點,搭建的漿液下移動機器人控制網絡具有特性,實現了網絡間的通信,對電機控制方法進行了探討,使電機能連續平穩的運行,最后對整個控制系統的軟件程序進行了設計。本文所涉及到的工作已調試成功。
光電開關相關文章:光電開關原理






評論