倒車雷達控制系統設計

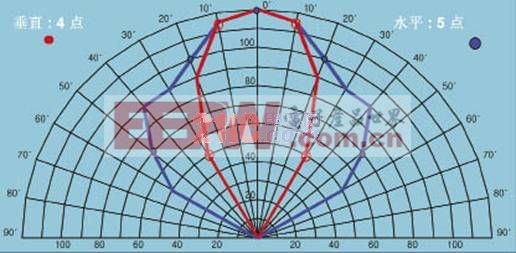
圖8 倒車雷達傳感器覆蓋區域要求
Cypress 的倒車雷達控制系統使用PSoC系統的主要原因是:1、它的資源靈活,PSoC的模塊資源具有可編程性,針對不同客戶、不同定位的產品需求可重新配置;2、集成度高,集成了PWM w/DB、比較器、A/D轉換器PGA等模擬模塊,模擬集成度高;3、它幾乎不需要外部器件,降低了 BOM 成本, 減小了電路板尺寸;4、它的IP保護能力強,很難被復制。
PSoC倒車雷達控制器采用CY8C24633芯片作為主控芯片。芯片采用 M8C處理器,運行速度高達24M,內含8×8的乘法器和32位的累加器。工作電壓范圍為3V~5.25V,溫度范圍為工業級:-40℃~85℃。該 PSoC芯片包括4個數字模塊和4個模擬模塊(2CT/2SC)。另外它還擁有針對電機控制而優化的高速8 位 SAR AD轉換器。
圖 9為Cypress倒車雷達系統的硬件框圖,采用CY8C24633用于主控板。該設計使用收發一體的傳感器,并在傳感器端增加初級放大電路。驅動信號為 40kHz的脈沖信號。每個傳感器采用3線連接方式與主控板連接,最多可接6路傳感器輸入。對交流信號進行電平抬升,從而更好地處理回波信號。內部的模擬模塊可配置成PGA、比較器及帶通濾波器,并在器件內部實現互連。主控板與顯示器通過串口連接,顯示器通過數字方式顯示探測距離。
圖10 給出了PSoC內部模塊的配置和信號的路由,從圖中可以看到,4個數字模塊分別被配置成PWM計時器、定時器和串口發生器。而四個模擬模塊分別被配置成兩個PGA放大器和
一個帶通濾波器,信號的路由從圖中也可以看得非常清楚,
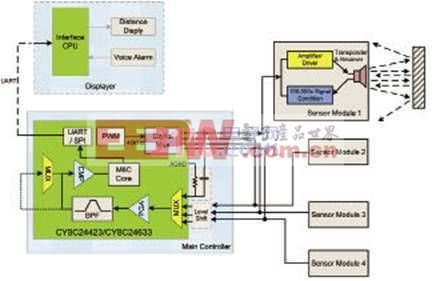
圖9 Cypress倒車雷達控制系統硬件框圖
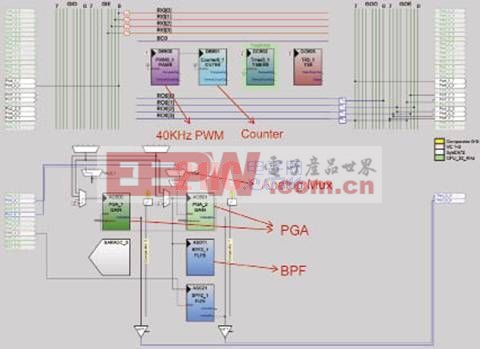
圖10 PSoC內部模塊配置













評論