倒車雷達控制系統設計

圖4顯示出倒車雷達發展的趨勢,從圖中可以看到,最初的倒車雷達,只有后方探測,現在的倒車雷達不僅實現了前后方探測,甚至連左右側都可以進行探測。還有一些更先進的技術,已經使用在高檔汽車上。
低端倒車雷達系統
倒車雷達系統一般由兩部分組成,分別是探頭部分和主控部分。探頭部分一般安裝在汽車的尾部或兩側,而主控部分則位于汽車的前端,靠近汽車駕駛員。低端倒車雷達(圖5)的探頭部分,通常只包含超聲波傳感器,而主控部分包括CPU和所有的外圍電路。探頭和主控板通過傳導線連接,傳送發送和回波信號,一個主控板帶3到4個探頭。低端的倒車雷達系統成本通常較低,多采用分立元件,集成度也較低,因而性能較差,有效測量距離小于 1.5m。此外,報警也采用簡單的蜂鳴器。
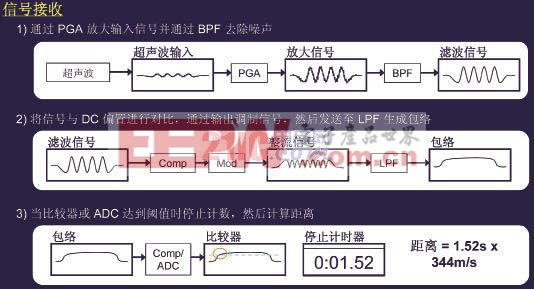
圖3 超聲波信號接收

圖4 倒車雷達的發展趨勢
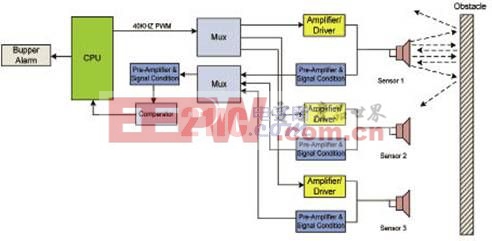
圖5 低端倒車雷達系統框圖
中端倒車雷達系統
中端的倒車雷達系統在探頭上除了安裝超聲傳感器以外,還包括發射信號的放大和驅動電路,以及接收信號的放大和信號調理電路,這樣可以減小信號在長線傳輸中引入的噪聲的影響。另外,在控制板上,使用了兩級放大和帶通濾波器以提高測量的性能。而測量的距離,通常通過數字顯示的方式來顯示,并且伴有聲音的報警和提示。
高端倒車雷達系統
圖7是一個高端的倒車雷達系統的系統框圖。可以看到,本來處于主控端的一些功能模塊都被轉移到探頭一端,它的特點是在探頭上帶有信號放大電路以及處理器,測量信號在傳感器上實現處理,因此沒有長線傳輸存在的信號干擾問題。另外,它可對每個傳感器進行單獨校準,通過LIN或其他串行方式與主CPU進行通訊。因為通常探頭部分的體積都比較小,為了在探頭上實現信號的放大和處理,就需要較高集成度的器件以方便傳感器和PCB板的集成。
圖8給出了倒車雷達傳感器覆蓋區域的要求,它要求在水平方向上70±5cm范圍內最小100°;在100±5cm范圍內,最小 40°。垂直方向上,在50±5cm范圍內最小60°;在110±5cm范圍內,最小20°。
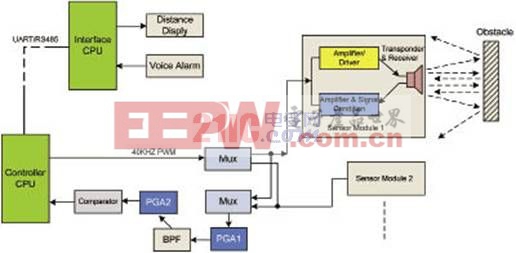
圖6 中端倒車雷達系統框圖
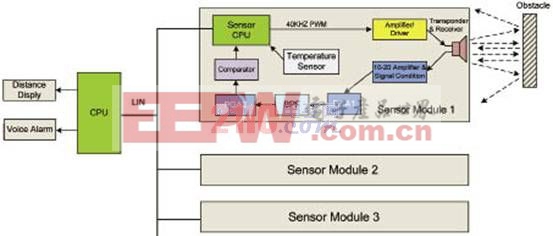
圖7 高端倒車雷達系統框圖
蜂鳴器相關文章:蜂鳴器原理












評論