微小型無人機全姿態增穩控制系統的設計與實現

3 姿態增穩控制軟件設計
整個飛控系統的輸入量即為傳感器所采集的飛行狀態值,輸出量為飛機狀態方程的控制變量(舵值和發動機推力),所以飛控系統實質上是一個多通道的控制系統,即多輸入/多輸出控制系統。其中,飛控系統的核心控制回路是以姿態角(俯仰角/滾轉角的)反饋信號為基礎構成的飛行姿態穩定和控制回路,即內回路。
在內回路的基礎上,又引入高度保持、航跡控制等外回路。
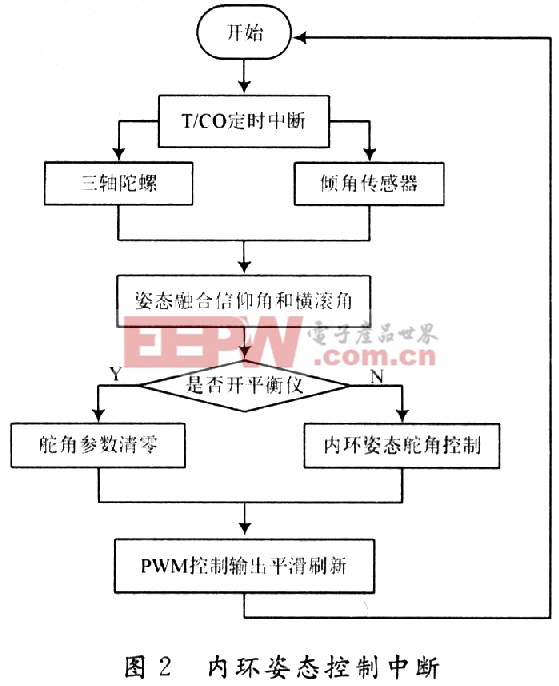
在飛控系統的姿態增穩控制回路中三軸陀螺實時反饋飛機的俯仰、橫滾和偏航的角速率。另外,將三軸陀螺的俯仰角速率和橫滾角速率分別與傾角傳感器測得的俯仰角和橫滾角進行姿態捷聯解算。主控單片機利用定時/計數器O的定時中斷,間隔30 ms循環進行內環的姿態控制,控制流程如圖2所示。由于飛機沿縱向平面的對稱性,無人機飛行控制可以分為相對獨立的縱向控制和橫側向控制通道。本文引用地址:http://www.104case.com/article/163046.htm
(1)橫側向控制通道:無人機的橫側向運動即無人機的滾轉和偏航運動,主要通過副翼通道來實現。在橫側向控制通道中有滾轉角反饋和滾轉角速率反饋,這兩項構成了滾轉通道的核心回路――內回路。另外,航向偏差反饋只有在無人機作定向直飛、航向跟蹤或者自主導航時才需要接人,以穩定控制無人機的飛行航向;側偏距反饋僅當無人機進入自主導航時才需要接入,以控制無人機跟蹤預先設置的飛行航線;誤差積分反饋僅僅當無人機做定向直飛時才接入,以消除無人機左右不對稱性等因素的影響,改善無人機航向控制的精度以及左右轉彎的對稱性。
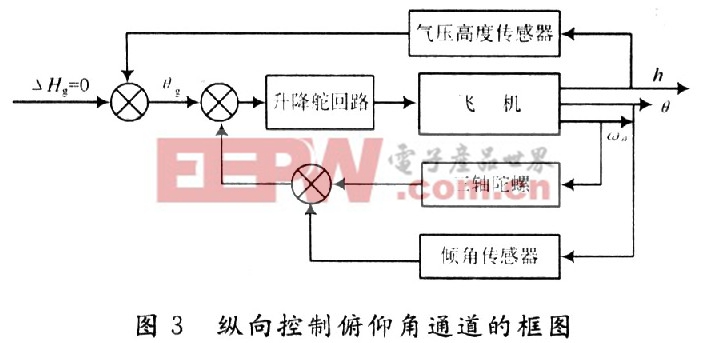
(2)縱向控制通道:無人機的縱向運動即指無人機的俯仰及升降運動。無人機的縱向運動規律是通過操縱無人機的升降舵來實現的。在縱向控制通道中有俯仰角反饋和俯仰角速率反饋,這兩項構成了縱向通道的核心控制回路――內回路。另外,還有高度差反饋,只有在無人機做定高飛行時才需要接入,以穩定無人機的飛行高度。縱向控制俯仰角通道的框圖如圖3所示。
通常可以把無人機飛行過程劃分為幾個相對獨立的航段。一個最基本的自主飛行工程可以劃分為6個航段:起飛階段、出航平飛階段、轉彎階段、返航平飛階段、盤旋階段和著陸階段。每個航段的任務相對獨立,把各航段的復雜飛行狀態分解為幾個基本的飛行任務:平飛、轉彎、升降等。這樣通過相對獨立的縱向控制通道和橫側向控制通道來協調實現無人機的平飛、轉彎、升降等基本飛行任務。
4 結語
在無人機中,飛控系統是主要組成部分,而姿態增穩控制則是對無人機順利執行各項任務的有效方法。本文以實際應用為背景,詳細介紹了基于三軸陀螺和傾角傳感器構成全姿態增穩控制系統的硬件實現及軟件設計,并將其運用在某型無人機中,針對系統中飛行姿態控制的的流程和內環姿態控制的規律進行了詳細的分析與研究。經過百余次試飛,基于三軸陀螺和傾角傳感器構成的姿態增穩控制系統,不僅滿足了現階段任務要求,還達到了良好的效果,為同類無人機的開發與研制提供了一套行之有效的方法。








評論