某位置伺服系統中運動控制方法技術

在我們研究的系統中,所用的方法是多次積分分離以及在正反向超調的過程中進行的積分分離。
首先我們對所用的參數整定數學模型進行一下描述,其中的分段見圖1。
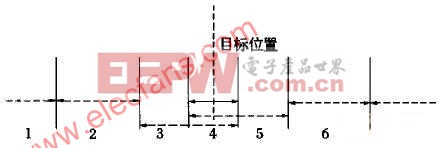
圖1 分段圈
圖1中,1和7表示在全速運動區間有正、負之分。以右為正,左為負;2和6分別表示在目標位置的左、右利用純比例調節控制的區間;3和5分別表示需要利用常規PID算法的部分;4表示在小誤差范圍內利用比例積分控制。
上述分段是針對實際系統進行的分段,是適合這個系統的一個分段方法,它不僅在速度和精度上都可以滿足要求,而且比我們所用過的其它方法都更加適合這個系統。
4 參數整定
由于我們研究的這個系統是一個位置精度要求比較高的系統,所以對參數的整定要求比較高,在不斷實驗的基礎上總結出了一套適合本系統的通過近似計算得到參數的方法。
由于本系統是一個隨動系統,建立系統精確的數學模型比較困難,只知道前向通道的放大倍數是N,電機飽和電壓是U1以及電機的最大速度是v1。位置環參數的整定影響整個系統的精度和快速性,我們在不斷實驗的基礎上,總結出如下方法:
(1)對系統進行相應的分段。分段是根據實驗確定的,由于系統本身是復雜的非線性的高階系統,所以分段是一個比較重要的環節,通過實驗不斷測試系統在不同情況下的階躍響應,將其作為分段依據。
(2)確定最后算法部分的參數。我們對不同的位置采用不同的PID算法,其中轉折部分的電壓是一個比較關鍵的參數,根據實驗,我們確定將通過算法輸出的電壓乘以前向通路的放大倍數作為加載到電機上的電壓值,當然這個電壓值必須使得電機在負載情況下還有速度。
(3)確定2段、6段的比例系數。這里的比例系數是通過兩個轉折點的電壓和位移量來得到的,是一個線性的函數關系,即U輸出=KPS位移。其中,U輸出是算法輸出部分;KP是2段、6段的比例系數;S位移是相對于目標位置的位移量。通過1和2或6和7之間的轉折部分可以得到一組U輸出、S位移,并通過2和3或5和6之間的轉折部分又可以得到另一組U輸出、S位移,從而確定KP。
(4)確定第4段的PID參數。通過以上得到的轉折部分的電壓值,我們有了起始電壓,再根據得到的起始電壓,就可以確定比例系數。確定這個比例系數時,必須使得積分和微分系數為0。通過這個比例系數的確定,我們就可以完全地通過計算得到所需要的參數。為滿足精度的要求,根據經驗加入適當的積分項就可以完成參數的整定。注意這里積分項加的越小越好,當然要在保證精度的范圍內。
5 結 論
通過實驗證明我們所得到的運動過程滿足了快速性和精度的要求。在實驗中總結出的方案是可行的,也是合理的。











評論