某位置伺服系統(tǒng)中運動控制方法技術(shù)

本論文結(jié)合上述情況,在某項目中總結(jié)出了一套對PID算法的參數(shù)進(jìn)行整定的方法。PID調(diào)節(jié)方法是三階系統(tǒng)中一種常用的有效控制方法。PID在許多系統(tǒng)中能夠得到廣泛的運用是由于這些系統(tǒng)都存在非線性和未知的干擾,尤其是在模擬和數(shù)字的混合系統(tǒng)中,由于模擬信號很容易受到影響,導(dǎo)致系統(tǒng)設(shè)計較為復(fù)雜。在一些相互合作的項目中,由于存在單位之間需要保密的原因,對系統(tǒng)的理論分析通常不能夠做到具有精確的數(shù)學(xué)模型,因此,PID算法是解決這類情況的一種有效控制方法。
本文引用地址:http://www.104case.com/article/163004.htm1 傳統(tǒng)數(shù)字PID算法
位置式PID控制算法描述為:

令![]() 則離散化的PID位置式控制算法的編程表達(dá)式為:
則離散化的PID位置式控制算法的編程表達(dá)式為:

式中:k――采樣序號;
u(k)――第k次采樣時刻的計算結(jié)果;
e(k)――第是次采樣相對目標(biāo)位置的偏差值;
Kl――積分系數(shù);
KD――微分系數(shù);
KP―― 比例系數(shù);
TI――積分時間常數(shù);
TD――微分時間常數(shù);
T――采樣周期。
由式(2)可以看出,每次輸出與過去的狀態(tài)有關(guān),要想計算u(k),不僅涉及到e(k-1),且須將歷次相加。故用式(2)計算復(fù)雜,浪費內(nèi)存。控制從手動切換到自動時,必須先將計算機的輸出值設(shè)置為原始閥門開度uD,才能保證無沖擊切換。
1.2 增量式控制算法
增量式PID控制算法描述為:
增量式只需計算增量,當(dāng)存在計算誤差或精度不足時,對控制量計算的影響較小。由于算式中不出現(xiàn)uO,易于實現(xiàn)手動到自動的無沖擊切換。此外,在計算機發(fā)生故障時,由于執(zhí)行裝置本身有寄存作用,故可仍然保持在原位。
基于以上兩種常規(guī)的算法,我們在實際應(yīng)用中又提出了多種改良的算法。在本項目中采用了積分分離PID控制算法。
2 積分分離PID算法
積分分離控制算法的數(shù)學(xué)模型如下:
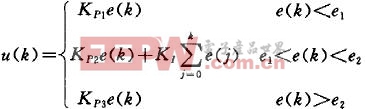
其中,e1、e2分別表示左、右的區(qū)間,即離目標(biāo)位置的距離,這是常規(guī)積分分離PID控制算法。在實際的應(yīng)用中可以根據(jù)不同的系統(tǒng)和實際情況再度進(jìn)行分段。3 位置伺服系統(tǒng)中的算法











評論