3 基于模糊邏輯的權值選取
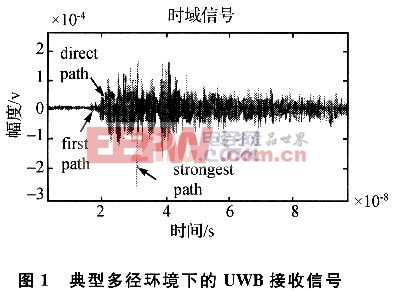
設UWB信號在T0時刻被發送���,在接收端節點接收到的首次到達信號和幅度最強信號的到達時刻分別為Tf和Ts�����,而直達信號到達時刻通過下式計算:
其中c=3×108m/s�,為無線電信號在自由空間的傳播速度�。
這里使用模糊邏輯技術來選取權值a。設首次到達信號和幅度最強信號的幅度分別為Ef和Es���,并定義E=|Ef|/|Es|,Tr=(Tf-T0)/(Ts-T0)����。Er和Tr為模糊邏輯函數的輸入��,a為輸出。Er、Tr和a分別定義了低��、中、高3個值���。選擇a值的規則如表1所列。














評論