基于霍爾傳感器的電動車窗防夾系統設計

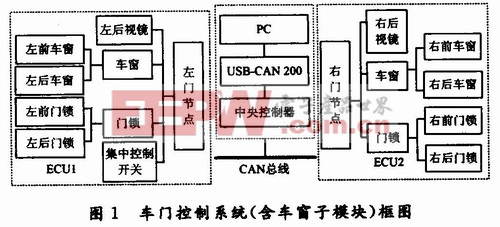
車門控制系統包括電動車窗控制系統和電動后視鏡控制系統兩部分,防夾電動車窗是車門控制系統的一個子模塊,在整個車門控制系統中,采用了一種“總體分布,局部集中式”的控制方案,如圖1所示。即將左側前后兩個車門的控制作為一個ECU模塊,右側前后兩個車門的控制作為另一個ECU模塊,兩個模塊之間以及模塊與中央控制器之間均以CAN總線方式連接。
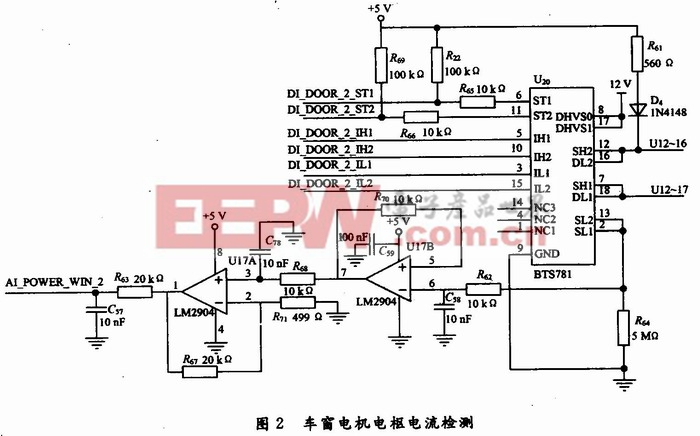
防夾系統硬件設計以BTS781為核心,通過ST1,ST2,IH1,IH2,IL1,IL2端口和微控制器XCl64CS芯片連接,接收微控制器發出的指令,來控制車窗的升降。通過在全橋驅動芯片BTS781的2和13號引腳上串接一個5 mΩ的電阻R37來檢測電機電樞電流變化,經過低通濾波和放大,送入MCU的A/D端口進行采樣,如圖2所示。
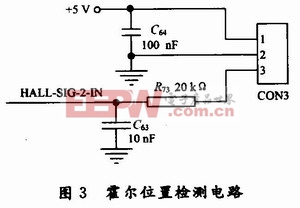
車窗位置測定采用霍爾傳感器輸出脈沖計數的方式實現。采用英飛凌TLE4923霍爾傳感器,直接輸出方波信號,經低通濾波,將脈沖信號輸入MCU對其進行計數,進而確定車窗的當前位置,如圖3所示。












評論