減少雜波干擾的可控硅調速電路設計

摘要:為了改善傳統電機調速系雜波干擾大,系統復雜的缺點,設計一種以工業單片機為核心運算控制芯片,可控硅采用過零檢測觸發方式,主回路由軟件、硬件協調完成,控制可控硅進行電機調速的電路,達到了減少主電路雜波干擾的目的,控制靈活,系統設計簡單,檢測和維護方便。
關鍵詞:雜波干擾;可控硅調速;過零檢測;觸發
可控硅具有功率大,效率高,體積小,重量輕,無噪音,控制靈敏等優點,而且還具有使用小電流,小功率來控制大電流大功率的特點,其應用范圍,前途都非常廣泛。用單片機實現可控硅過零調速,相比于變頻調速,不僅可使可控硅的導通角控制由軟件完成,觸發電路有結構簡單,控制靈活,精度可通過軟件補償,任意調節轉速等特點,還可以避免類似移相調速,脈寬調速(PWM),正弦脈寬調速(SPWM)等在調速過程中產生大量噪聲和高次諧波,對電路器件耐壓值要求較高的。
1 可控硅過零檢測調速控制的方法
數字實現可控硅過零控制的示意圖如圖1。可以看出,過零調速通過的工作電壓是完整的正弦波形,過零導通且過零截止。調速時通過改變在給定的時間內改變加在負載上的交流正弦波個數來調節電機的轉速。由于可控硅是在電壓(電流)過零時觸發導通的,導通時的波形是完整的正弦波或半波,所以不存在可控硅移相調壓調速所存在的一些缺點,如:產生大的射頻干擾,高次諧波等。這樣就解決了第一個問題,同時也提高了電路器件的安全系數。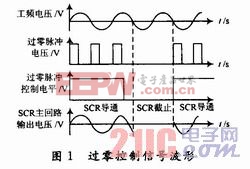
數字實現可控硅過零調速控制需要解決2個問題:實現工頻電壓的正負過零檢測,并在過零時產生脈沖信號;過零脈沖信號必須受單片機輸出信息控制,從而控制可控硅過零觸發時間。
過零脈沖信號的個數和時間間隔可以通過軟硬件協調解決。直接控制導通脈沖個數和截止脈沖個數就可以了,調速范圍可以從零到最高速度(加入完整的工頻電壓時的速度)。設最高速度轉速為n0,導通脈沖個數為k,截止脈沖個數為s,速度為n,理論上:
n=(k/s)n0 (1)
實際工作中要根據驅動負載設定轉速范圍。
2 硬件電路設計
硬件電路設計框圖如圖2所示。單片機為控制器的核心部件,其主要工作是接收220 V交流電的過零信號,根據過零檢測信號控制可控硅的導通時間;接收掉電檢測電路送來的掉電信號;檢測電機轉速等級并在數碼管上顯示。












評論