異步電機直接轉矩控制的ISR方法研究

磁鏈調節具體的控制策略為:磁鏈的計算值與給定值進行比較,若pi輸出大于零,則令hψ=1此時需要增大定子磁鏈,直到pi輸出為零,當pi輸出小于零,則令hψ=-1,此時需要減小磁鏈直至pi輸出為零。同理,轉矩的計算值與給定值進行比較,對于轉矩調節,若pi輸出大于零,則令hte=1此時需要增大電磁轉矩,直到pi輸出為零,當pi輸出小于零,則令hte=-1,此時需要減小磁鏈直至pi輸出為零。
在matlab的具體實現如圖8所示,轉矩調節器與磁鏈調節器結構相同。
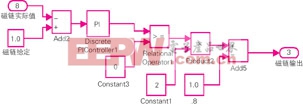
圖8 matlab中磁鏈調解器
5 仿真波形對比與分析
對異步電動機直接轉矩bang-bang控制與pi控制進行matlab仿真比較。在相同的采樣步長下,控制過程轉矩變化如圖9所示,電機先以最大轉矩達到設定轉速,然后穩定。在pi控制與bang-bang控制對比中我們很清楚的看到pi控制的轉矩脈動要比bang-bang控制平滑的多,如圖10所示。
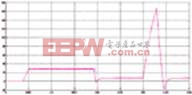
圖9 異步電機直接轉矩控制的轉矩波形

圖10 bang-bang控制與pi控制轉矩波形放大圖
從圖11的轉速響應曲線來看,轉速由10rad/s到20rad/s用時5ms,表明該系統具有良好的動靜態特性。
從圖12(a)與圖12(b)我們可以看出,基于pi控制的電流曲線要比基于bang-bang控制的電流曲線平滑的多,這說明pi控制不僅在轉矩控制上而且在電流上也優于滯環控制。

圖11 異步電機直接轉矩控制轉速響應曲線

圖12(a) pi控制的電流曲線

圖12(b) bang-bang控制的電流曲線
6 結束語
在系統處于空載時,采用pi調節器代替bang-bang滯環控制器能有效地減小直接轉矩控制方案中轉矩脈動,有效地抑制了電流諧波,具有良好的低速性能及動靜態特性,便于數字實現,使直接轉矩控制性能有了很大改善。本文引用地址:http://www.104case.com/article/162503.htm

逆變器相關文章:逆變器原理
逆變器相關文章:逆變器工作原理





評論