異步電機直接轉矩控制的ISR方法研究

3 傳統的bang-bang滯環控制策略
3.1 對定子磁鏈的控制
由式(4)、(5)可構建出定子磁鏈的計算模型,從而得到定子磁鏈的實際值ψs。圖4 為定子磁鏈滯環控制圖。圖5 為電磁轉矩滯環控制圖。

圖4 定子磁鏈滯環控制圖

圖5 電磁轉矩滯環控制圖
磁鏈滯環的輸入是磁鏈給定值ψs*與磁鏈實際值ψs之差,輸出是磁鏈開關信號hψ,±ε是滯環寬度。定義磁鏈誤差為:δψ=ψs*-ψs,則磁鏈調節器的控制方法如下:
(1)當δψ≥ε時,hψ=1,此時選擇電壓矢量使得|ψs|增加。
(2)當δψ≤-ε時,hψ=-1,此時選擇電壓矢量使得|ψs|減小。
3.2 對電磁轉矩的控制
轉矩調節器的輸入是轉矩給定值te*與轉矩實際值te之差,輸出開關信號hte,容差寬度是ε,調節器采用離散的三點式調解方式,矩誤差為:
δt= te*- te
則轉矩調節器控制規律如下:
當δt≥ε時,hte=1;
當|δt|≤ε時,hte=0;
當δt<-ε時,hte=-1;
得到磁鏈和轉矩的輸出信號后我們可以按照表2選擇對應的定子電壓矢量。
當定子磁鏈和電磁轉矩達到滯環上下限時,控制器調節定子電壓矢量使磁鏈和轉矩滿足設定要求如圖3所示。
4 基于pi調節器的新型控制方案
對式(4)、(5)我們忽略定子電阻我們可以近似得到:
對(7)(8)進行變形,我們得到:
我們可以看出在忽略定子電阻壓降時,單位時間內定子磁鏈的變化量為加在定子側的電壓矢量,即磁鏈的軌跡可由單位時間內的定子電壓矢量決定[2][3],如圖6。
在滯環控制中,只有當轉矩或磁鏈達到所設定的滯環寬度后,調節器才進行調解,而在新方案中定子磁鏈和電磁轉矩的調節是以單位采樣時間進行的,從而使調節更加精細,從而減小了轉矩的脈動。此外,由于定子側電壓矢量的調節是以單位時間進行的,故逆變器的開關頻率為常數,解決了傳統dtc控制開關頻率不固定的缺點。用pi調節器代替滯環控制的結構如圖7所示。
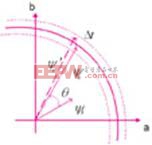
圖6 單位時間內磁鏈變化

圖7 定子磁鏈pi調節器控制

逆變器相關文章:逆變器原理
逆變器相關文章:逆變器工作原理





評論