自平衡人形機器人動作控制器的設計

自平衡人形機器人的多關節協調控制一直是機器人學研究的難點和熱點,目前采用的最多的是在大的反饋控制環路中對機器人進行關節空間的控制,這種控制方式結構緊湊,實時性強,但在以控制器為核心的輻射式控制鏈路上,所有信息的交換都集中在機器人主控制器上,當機器人處于復雜的環境中時,可能會有過多的信息需要處理,這種復雜程度往往是不可預知的,因此機器人的穩定性也不能保證。
機器人主控制器是機器人的核心處理器,是提高人形機器人的信息處理能力的主要部件。其主要任務是控制機器人在空間的運動位置、姿態、軌跡、操作順序和操作時間,因此必須保證主控制器能夠為解決復雜信息處理而穩定可靠地工作。機器人動作控制器是為解決機器人動作控制而設計的,它將主處理器發出任務處理命令分配到3個16位超低功耗單片機(MSP430F149)上去執行,實現多層次的控制管理。該人形機器人具有多關節,多自由度,自平衡的控制需求,需要動作控制器在機器人系統控制中起到關鍵性的作用。
1 動作控制器的設計
1.1 體系結構
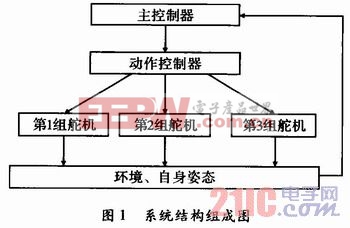
自平衡人形機器人需要獲取不可預知的環境信息以及自身姿態信息進行綜合運算并及時進行自身姿態的調整。機器人的這種行為特點決定了機器人的整體控制結構要采用反饋控制。如圖1所示,描述了這種反饋控制結構的硬件實現。
同時,在圖1中可見從機器人主控制器到執行元件(舵機)之間,有一層動作控制器的結構。這一層結構的任務是實現控制命令到舵機控制信號之間的功能轉換,這種體系結構的設計,就是借鑒計算機系統結構中的分層結構體系思想。采用這種分層的結構,實現了軟件和硬件、命令和動作的相對隔離。其突出的優點體現在能夠使主控制器專注于數據的處理,而對下行設備只負責發送指令,對于硬件的復雜的操作時序,由動作控制器負責產生。
1.2 實現過程
1.2.1 硬件實現
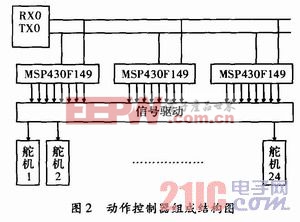
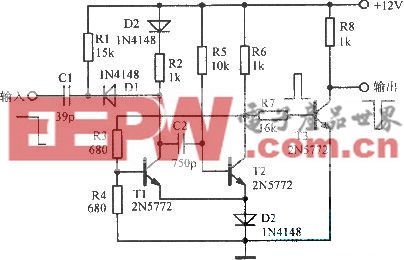
為滿足機器人整體控制體系結構中指令到執行的層次性要求,動作控制器需要完成命令解析,信號驅動等任務。如圖2描述了動作控制器內部的結構,其主要由串行總線、3個可并行工作的16位單片機、信號驅動部分構成。這種結構能夠從總線接收命令,單片機進行指令解析并輸出控制電信號,外部電路對控制信號驅動放大,從而分別實現對執行舵機的控制。圖3為動作控制器中一個單片機工作模塊的硬件原理圖。





評論