Buck型變換器數字PID控制器設計方法研究

3 Buck 型變換器數字PID 控制器設計實例本文引用地址:http://www.104case.com/article/162359.htm
仿真用Buck 及全橋變換器的電路參數如表1 所示,數字PWM 脈沖產生器均按D=u(k)/M 設計,其中M=4(M 對應于模擬PWM 產生器的鋸齒波峰峰值Um)。
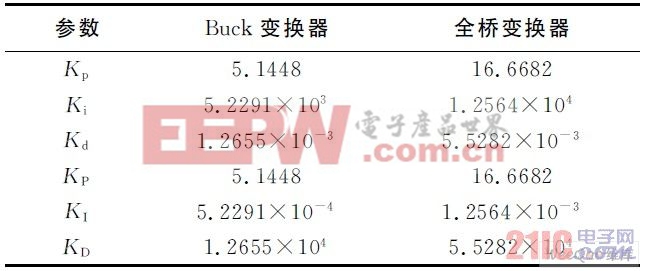
模擬PID 控制器零極點均按照以下方式配置:wc=1/5ws ,wz1 =wz2 =1/2wp ,則模擬及數字PID 控制器整定參數如表2 所示,采樣周期T=1×10-7s 。
表1 仿真用Buck 及全橋變換器電路參數

表2 仿真用Buck 及全橋變換器模擬及數字PID 控制器整定參數
根據圖1 所示的數字控制Buck 變換器系統框圖,依據電路參數及數字PID 控制器整定參數,在MATLAB/SIMULINK 仿真環境中建立數字控制Buck 及全橋變換器仿真模型,仿真結果如下:
額定負載條件下,數字控制Buck 及全橋變換器輸出電壓響應如圖4 所示。
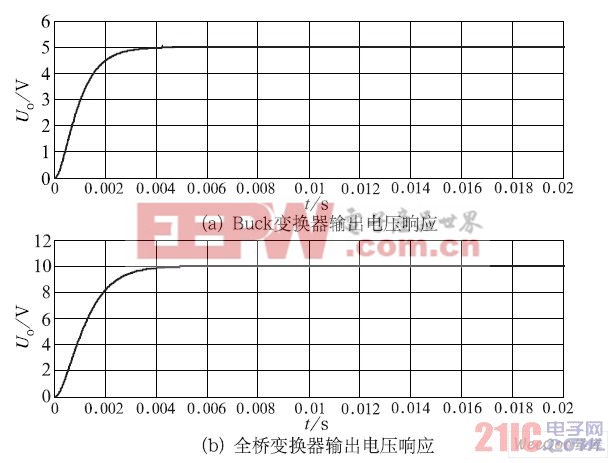
圖4 額定負載條件下輸出電壓響應
額定負載突變至50 %額定負載條件下,數字控制Buck 及全橋變換器的輸出電壓響應如圖5 所示。

圖5 負載突變情況下,輸出電壓響應
4 結 論
仿真結果表明,采用頻域補償設計方法整定模擬PID 控制器參數進而通過連續系統離散化方法設計實現的數字PID 控制器,能夠滿足Buck 型變換器系統的控制要求,輸出響應具有良好的靜態與動態特性。

pid控制器相關文章:pid控制器原理








評論